ROAM Lab [Columbia]
August 2018 – December 2019
• Developed/utilized reinforcement learning models (PPO, HER, ARS) and rewared functions for robotic • Designed and programmed ML/RL codebase to parse .xml, config files with experimental parameters to standardize algorithm deployment
• Reward engineered deep RL algorithms (PPO, HER, ARS) for robotic simulation tasks (push, pickup, place) via gym/MuJoCo
• Researched dynamic simulator optimization constraints and physics engine to robustly model tendon actuated robot hand in simulation.
• Trained/tested/evaluated kernel ridge regression algorithm to extract data from robotic finger
• Developed/manufactured an 8-DOF, 3 finger robotic hand via additive manufacturing, silicone molding, etc.

Succcesfully trained policy (PPO) 
Policy that maximizes a sparse reward and has no torque limits 
8-DOF Fully Actuated Hand
NASA Jet Propulsion Laboratory
June 2017 – August 2017
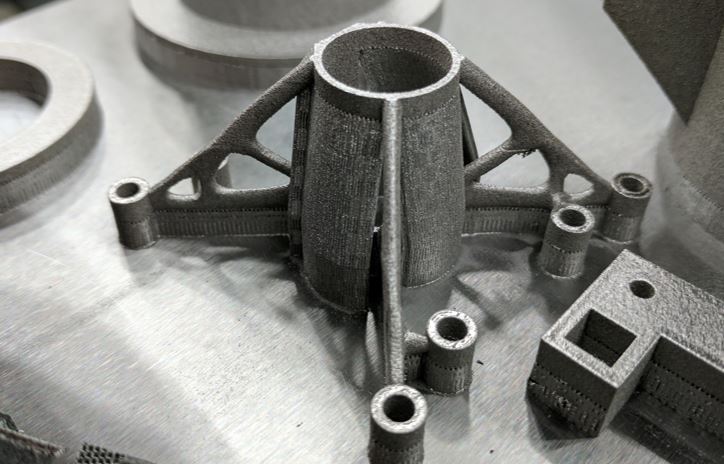
• Redesigned Mars helicopter parts using topology optimization, maximizing load efficiency while minimizing mass
• Utilized .stl editing software in order to manipulate CAD parts and develop lattice based support structures for 3D printing
• Developed test artifacts for Eos M290 metal 3D printer for both thermal and structural FEA and material characterization purposes.
CRAFT Lab [USC]
2016 – 2017
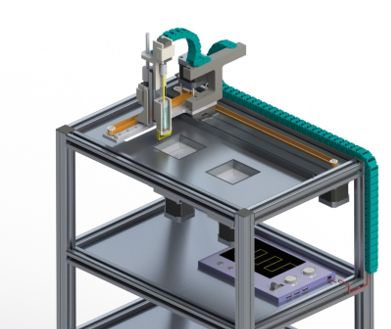
• Conducted and designed various piezoelectric vibration induced metal power deposition experiments to optimize build layer resolution
• Programmed Raspberry Pi microcontroller to allow powder extrusion nozzle to operate in three axes via stepper motors via Python
• Designed fixtures to optimize, test, and understand sintering resolution for various metal powders at various frequencies
