MaskRCNN for Camera and Video
As a fun personal project, I am currently working with Facebook AI Research’s MaskRCNN library for facial pose tracking and detection. I am learning more about computer vision and further my experience with deep learning architectures and projects~
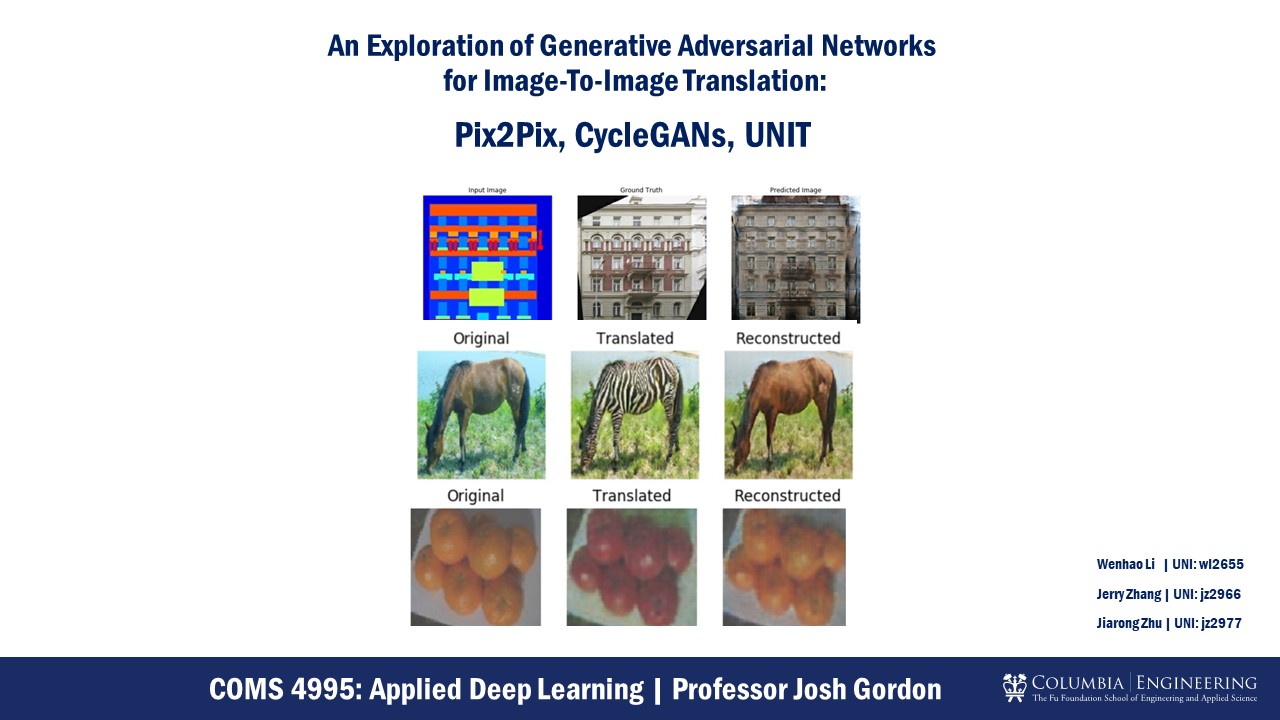
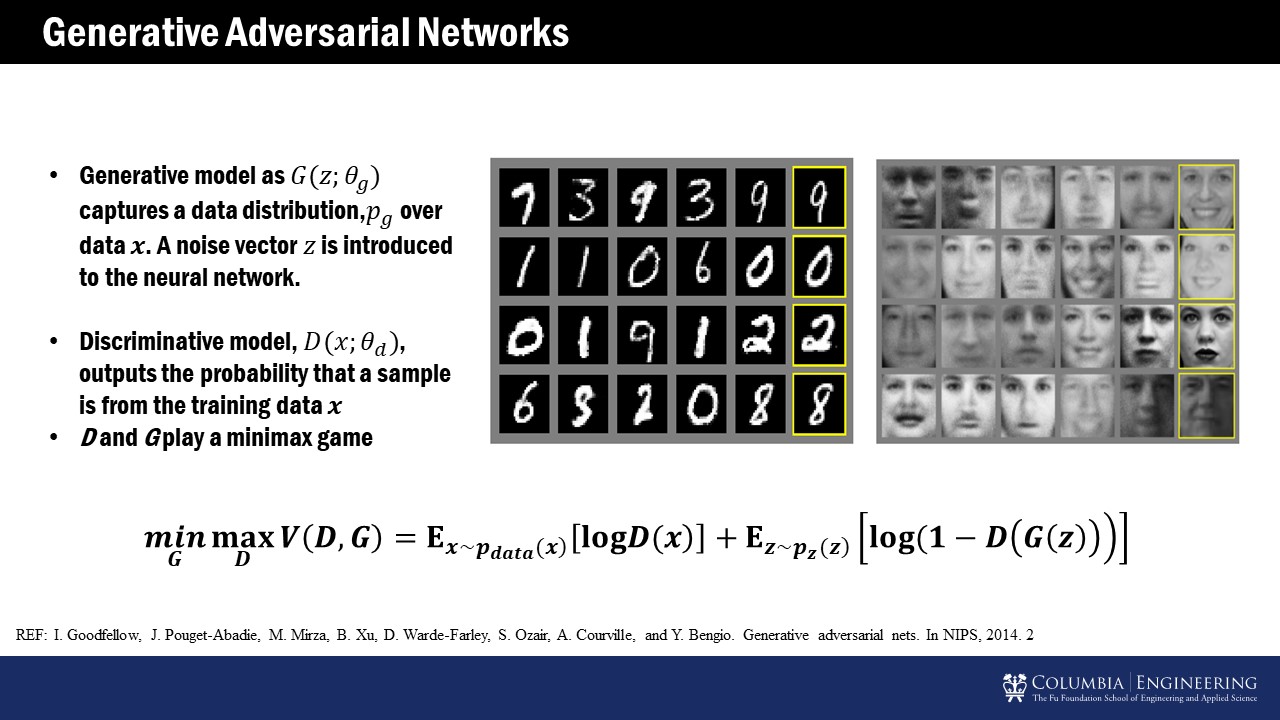
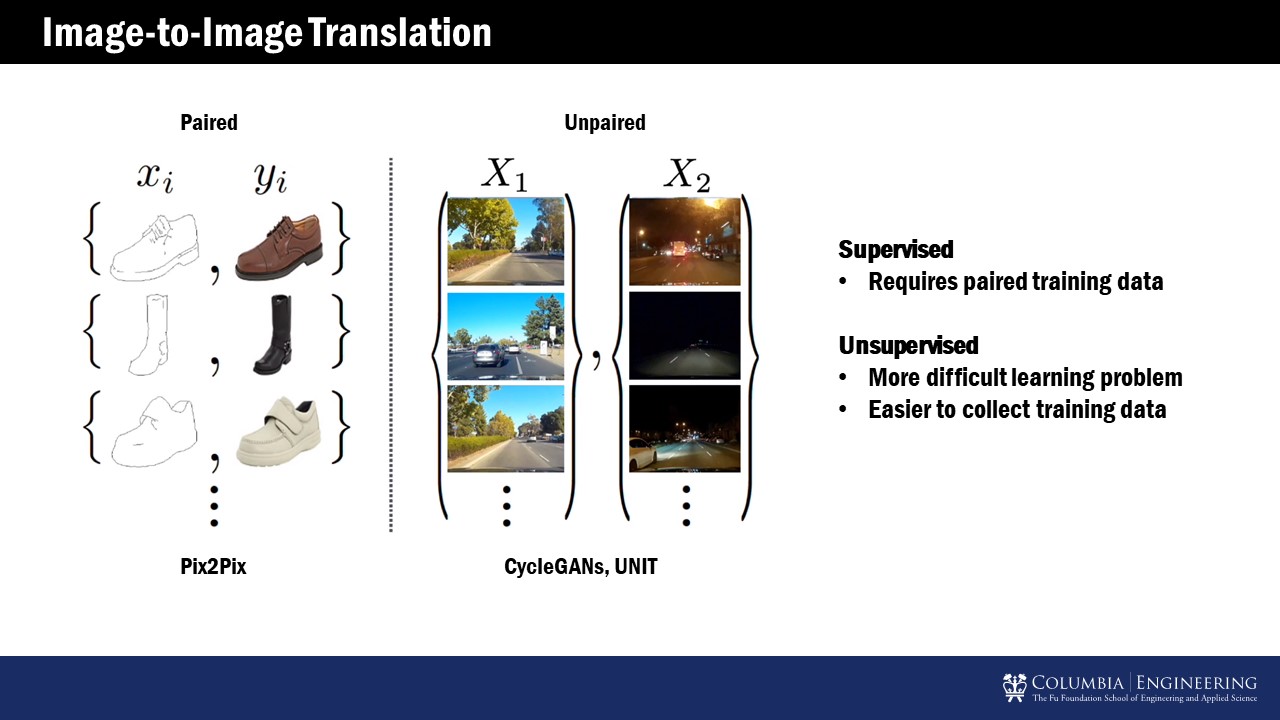
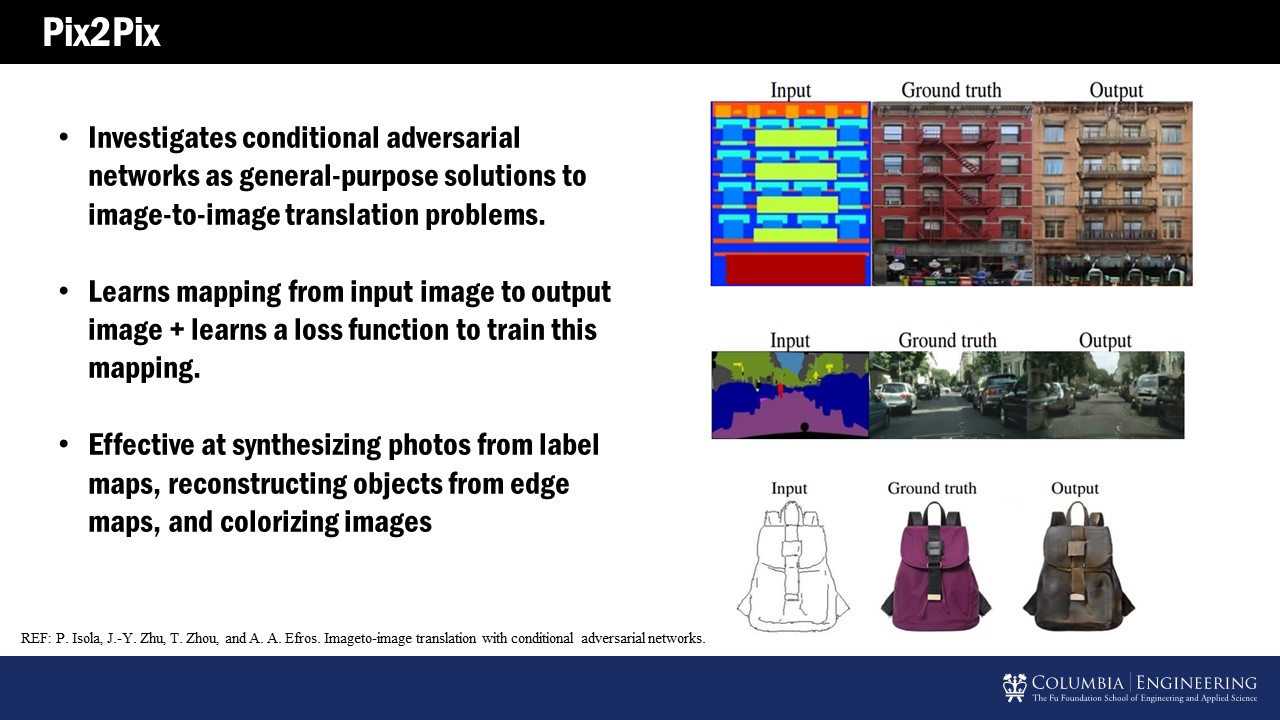
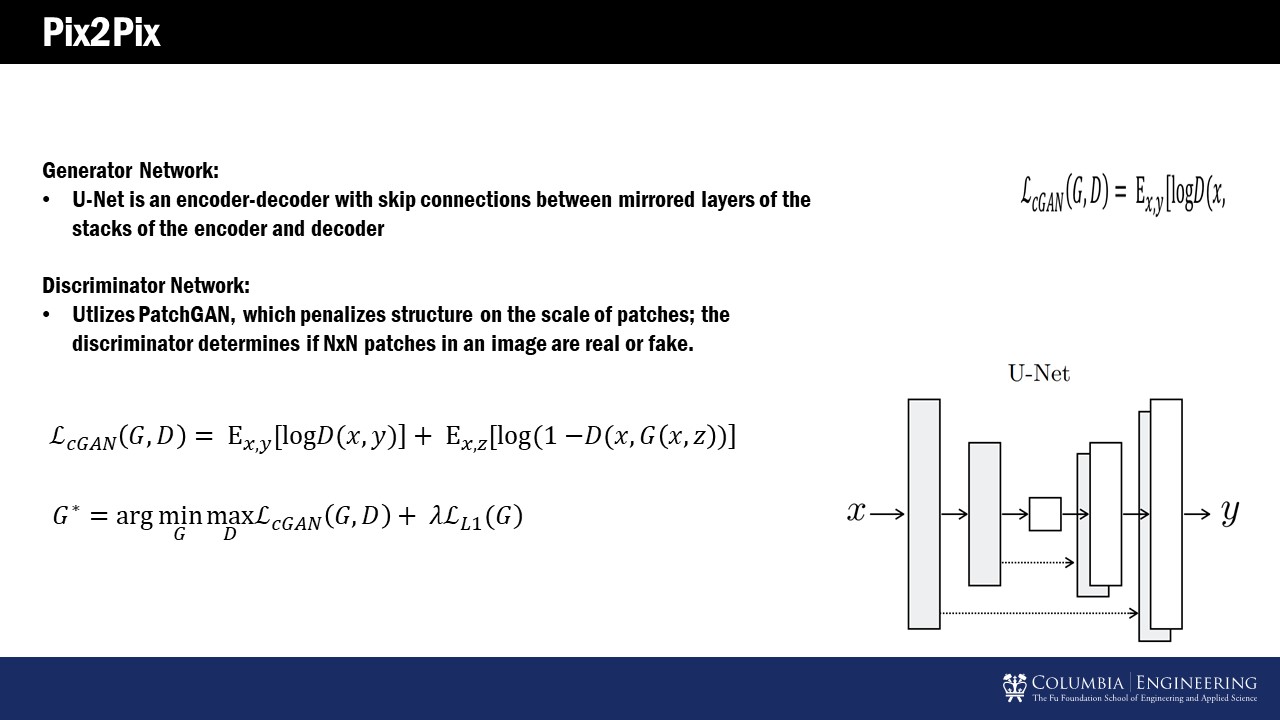
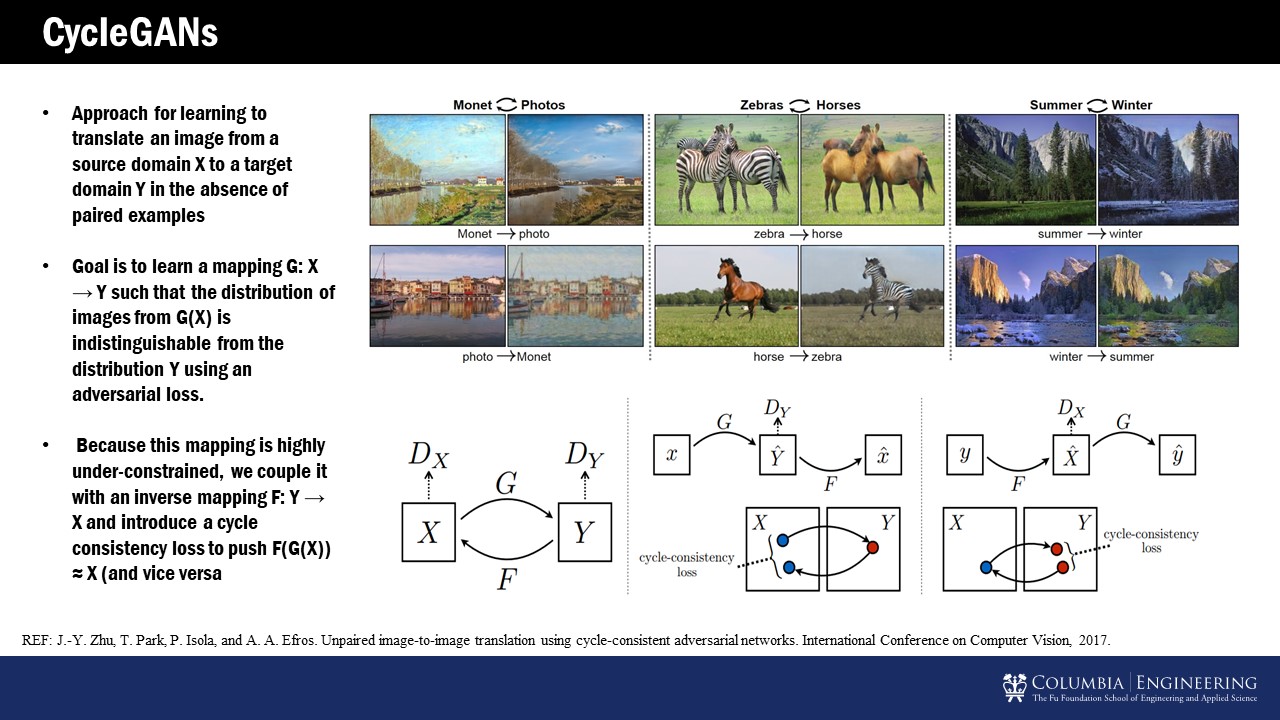
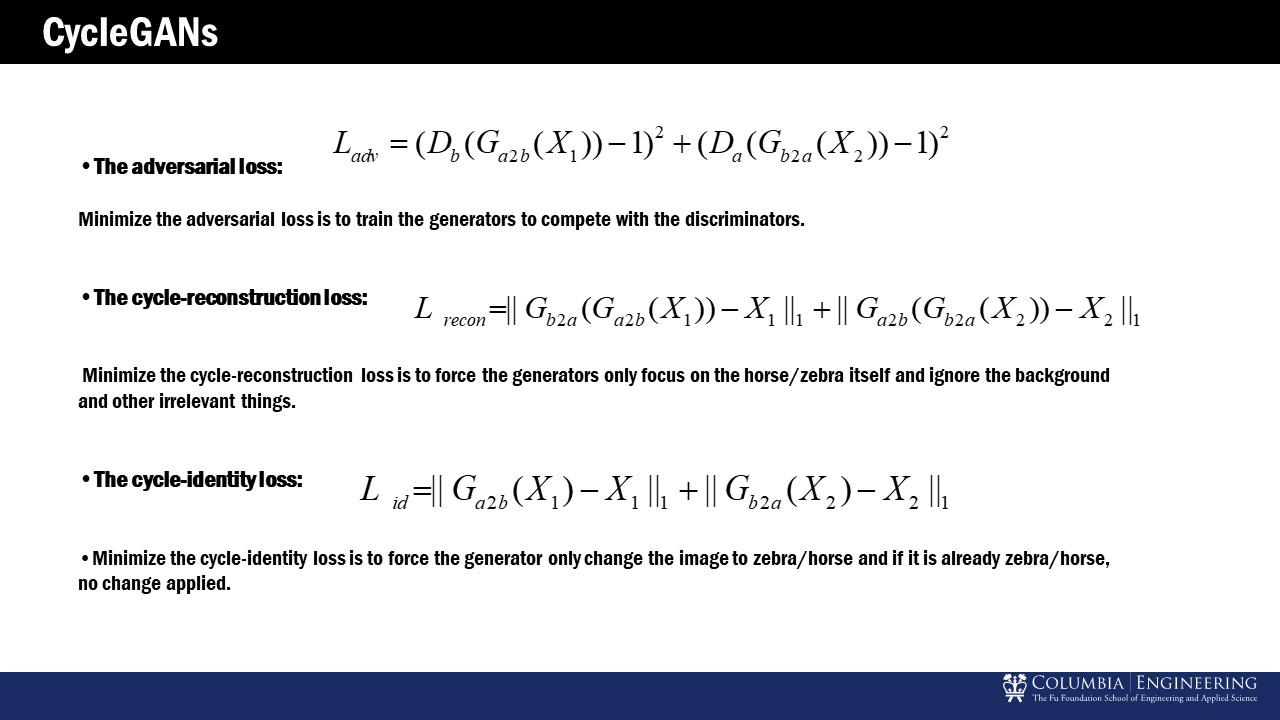
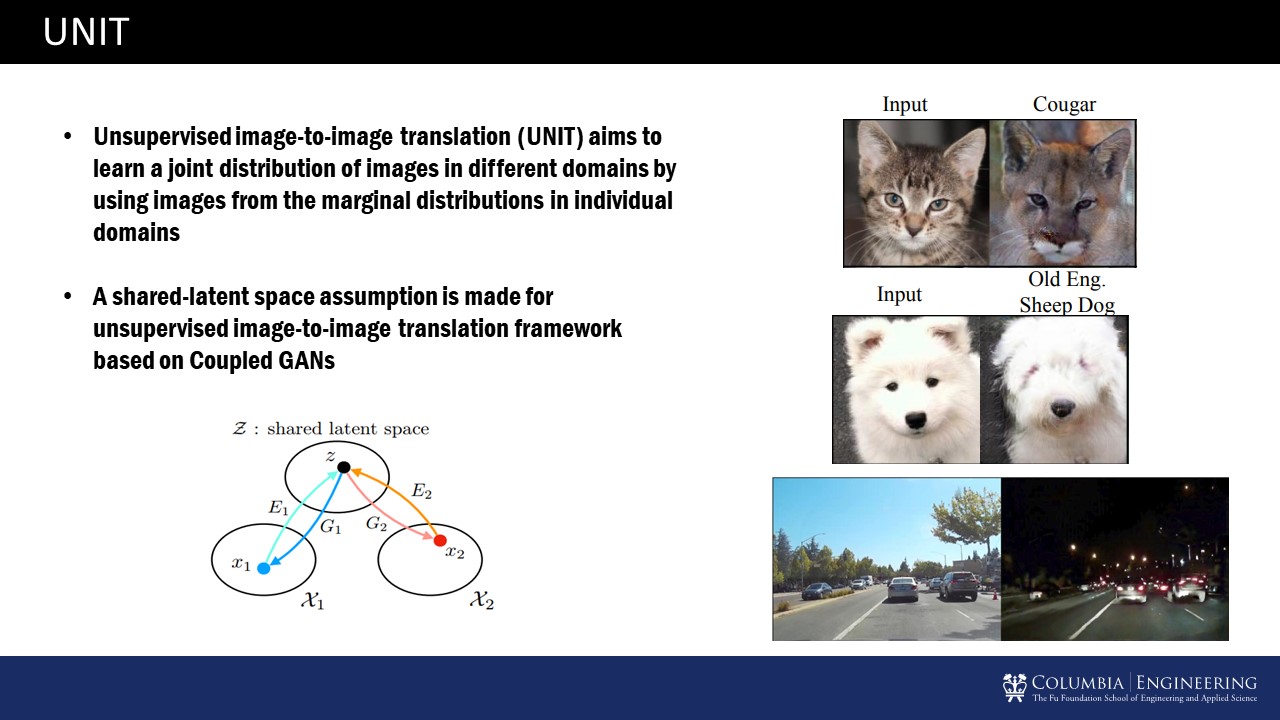
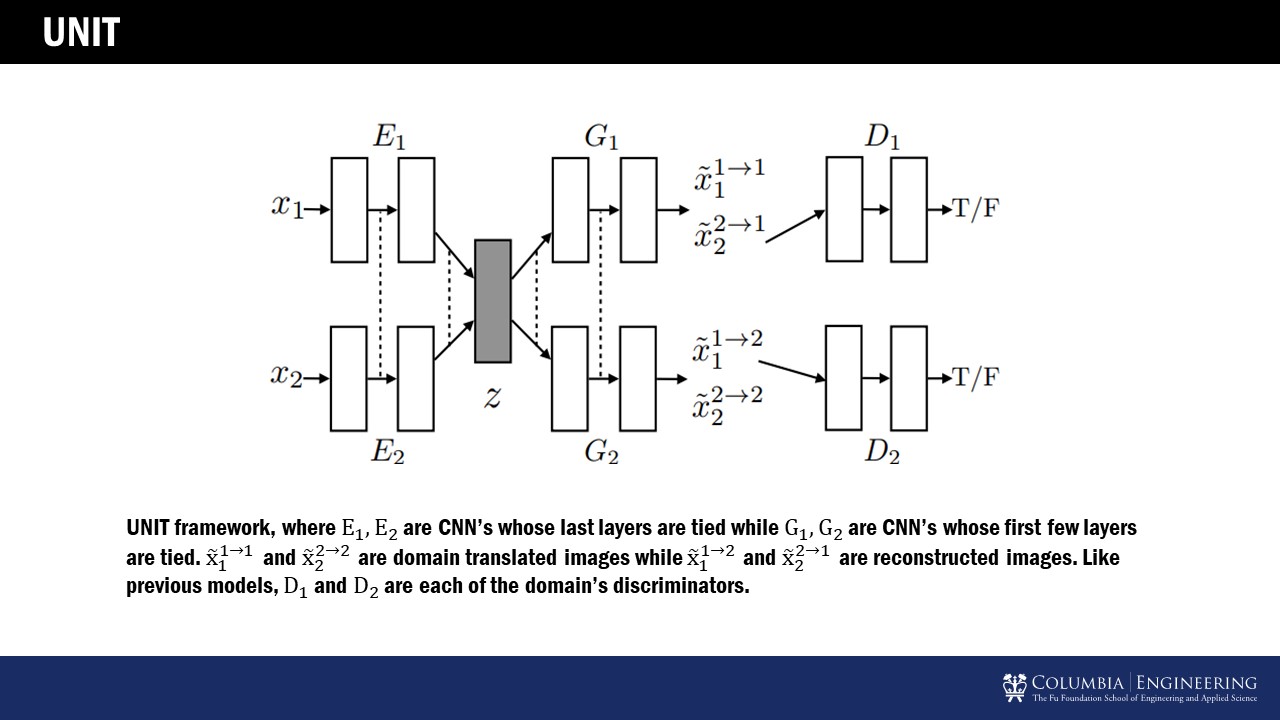
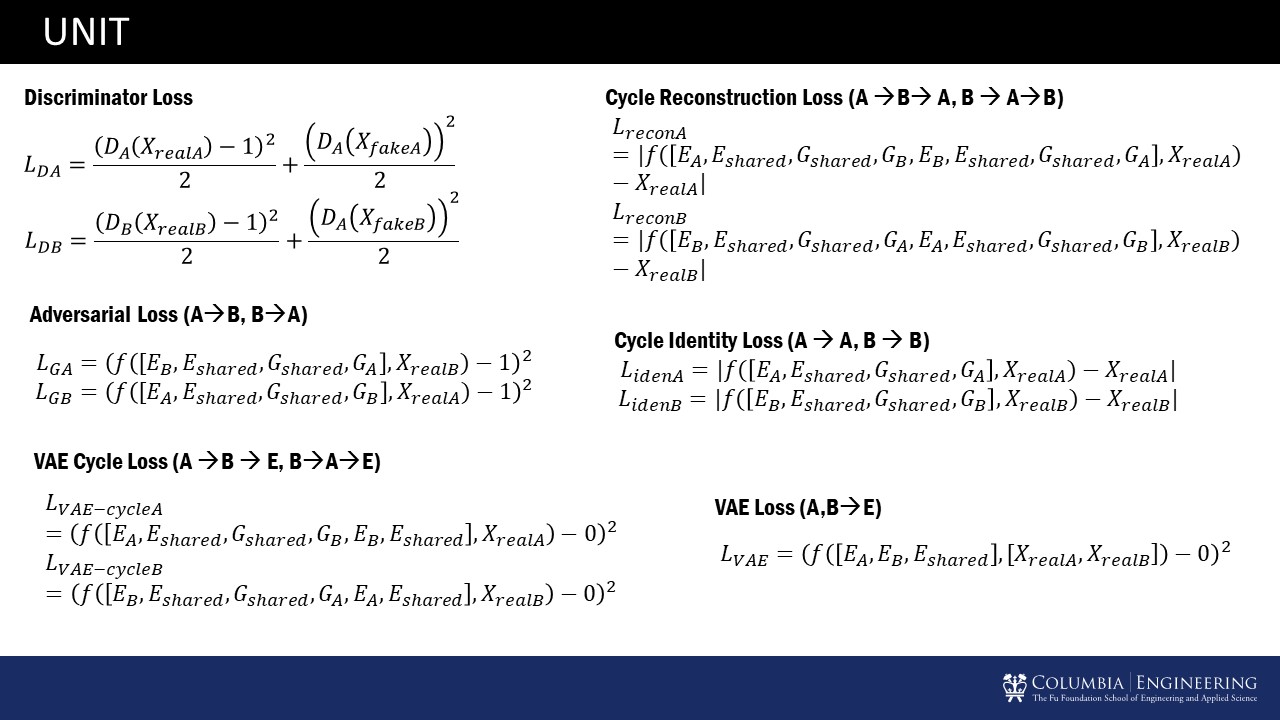
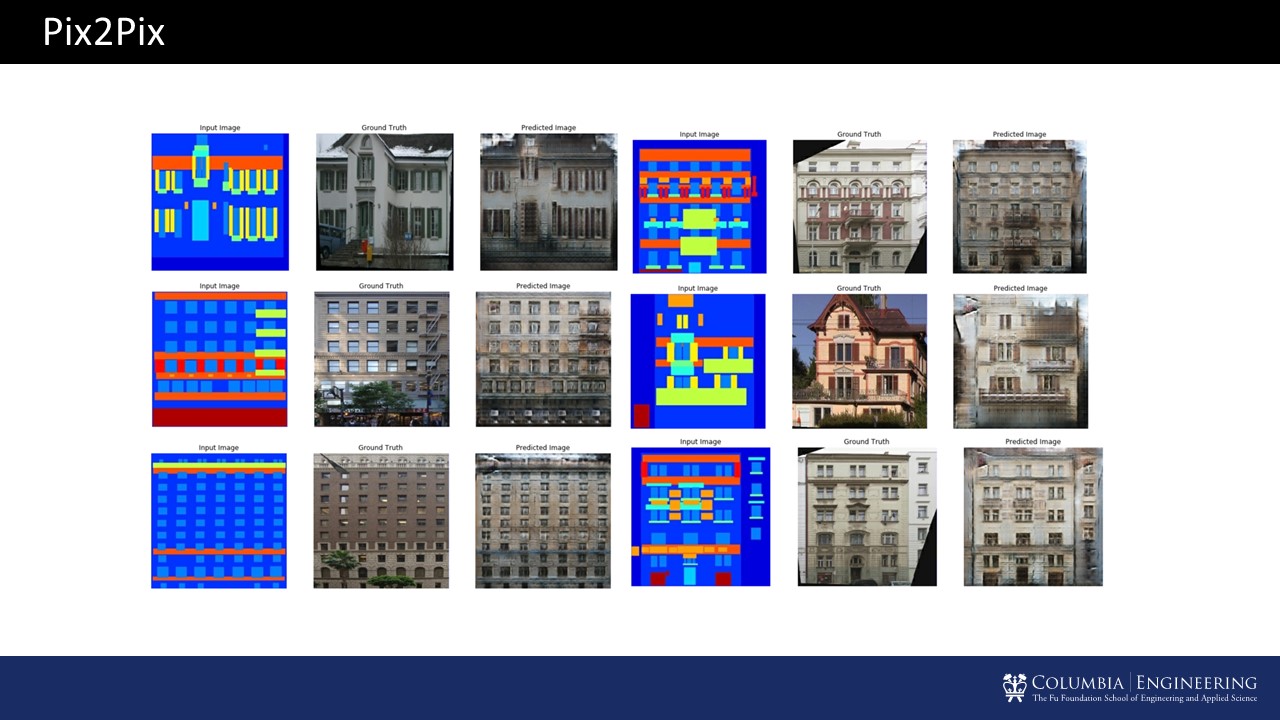
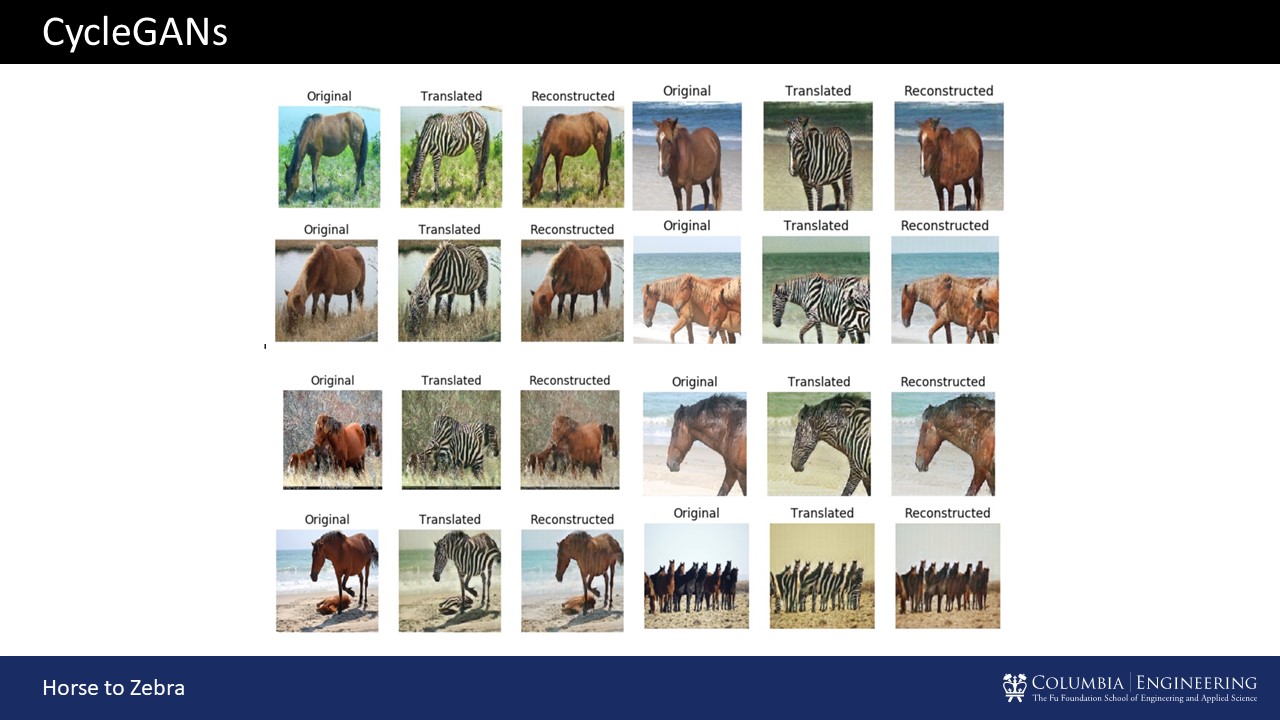
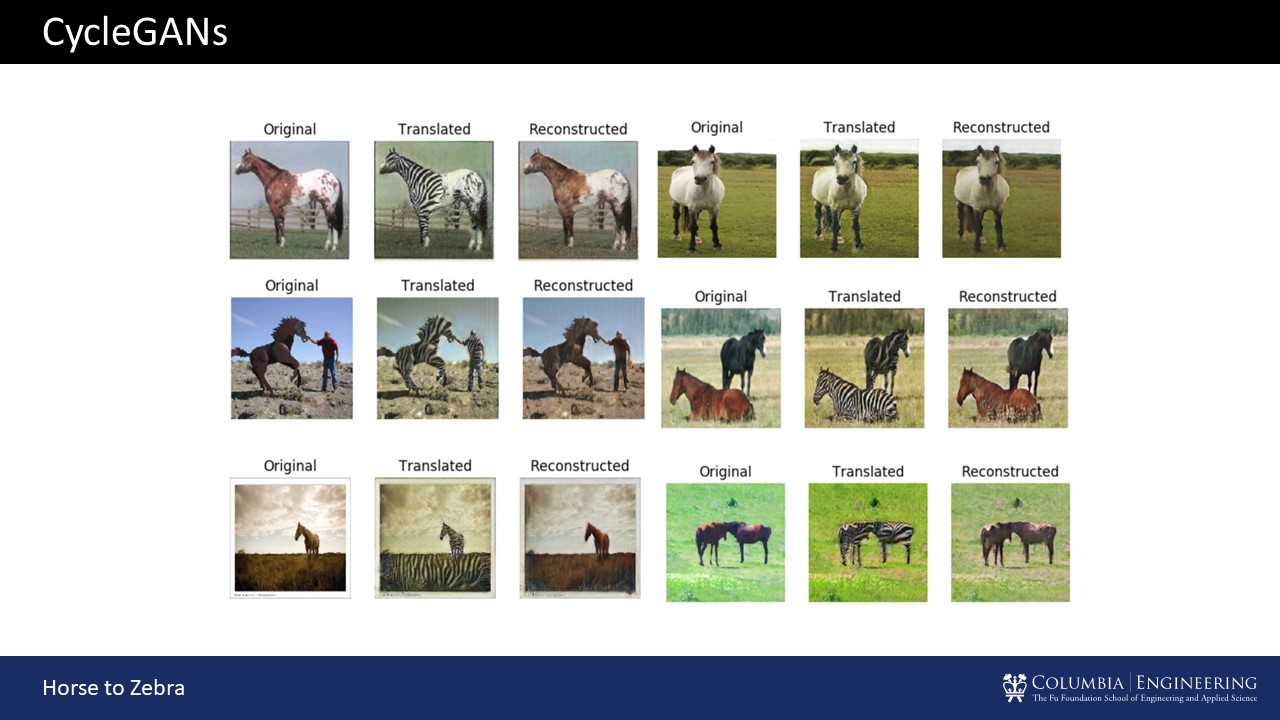
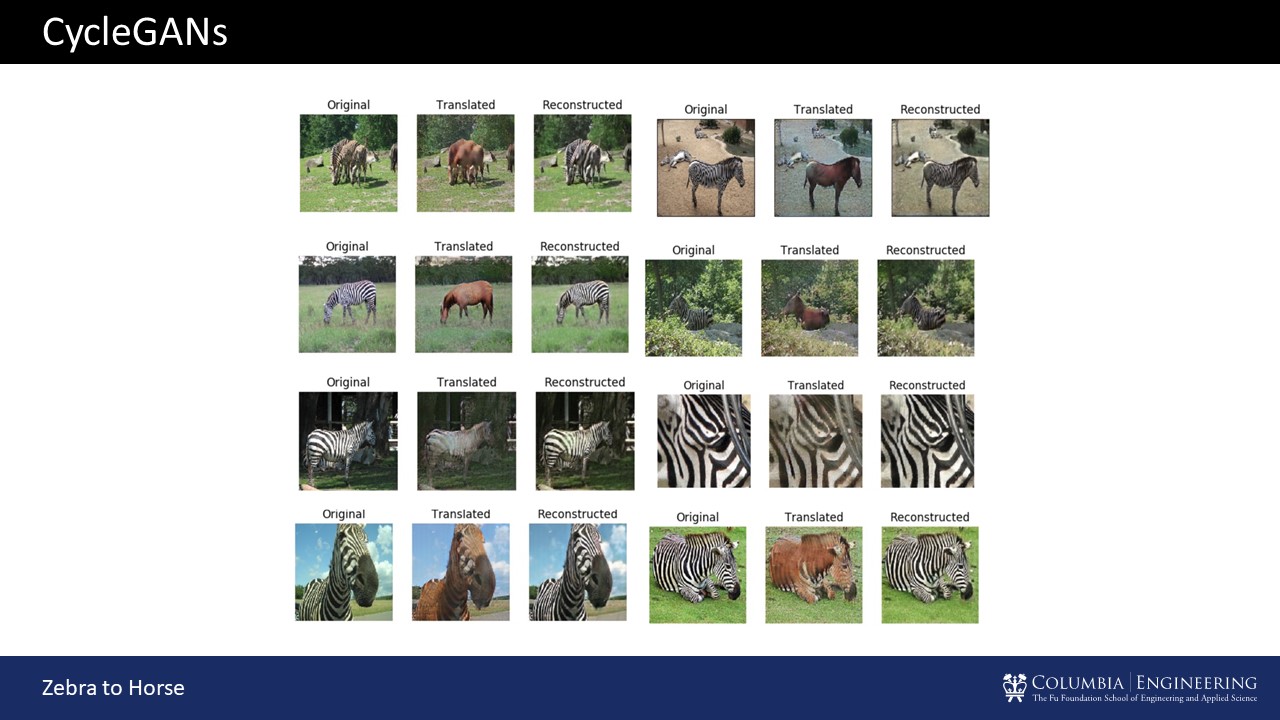
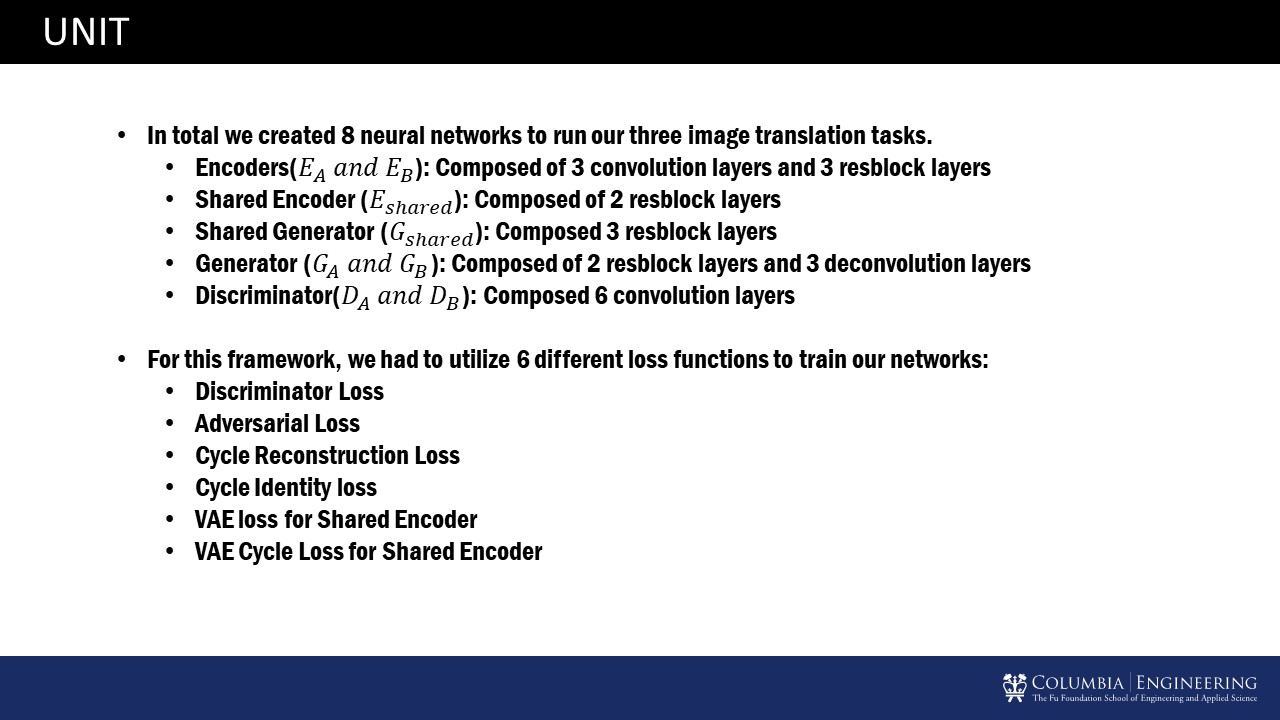
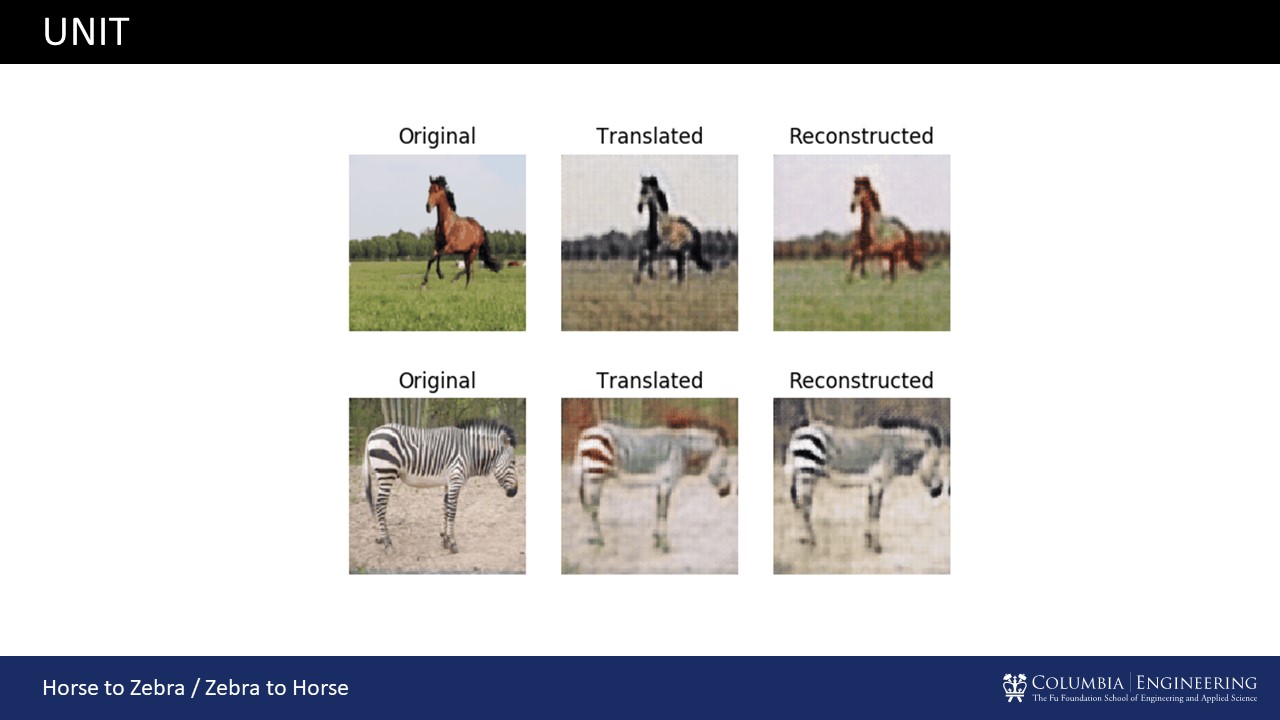
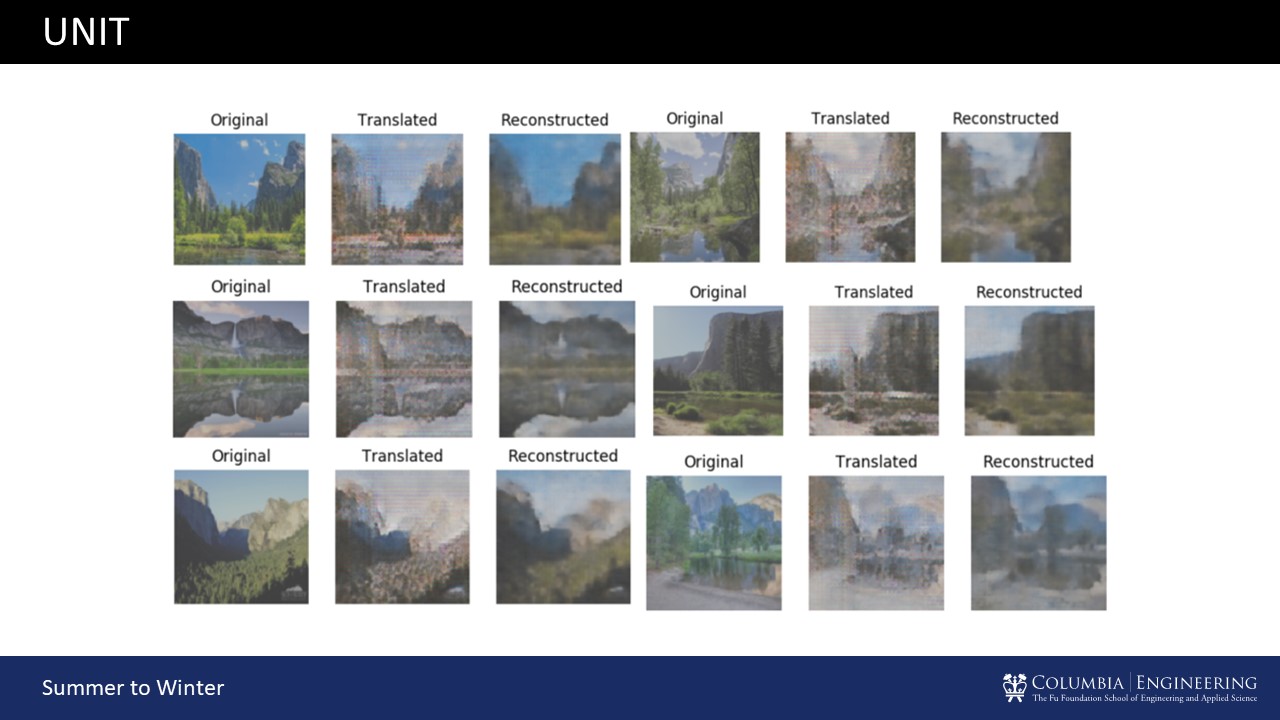
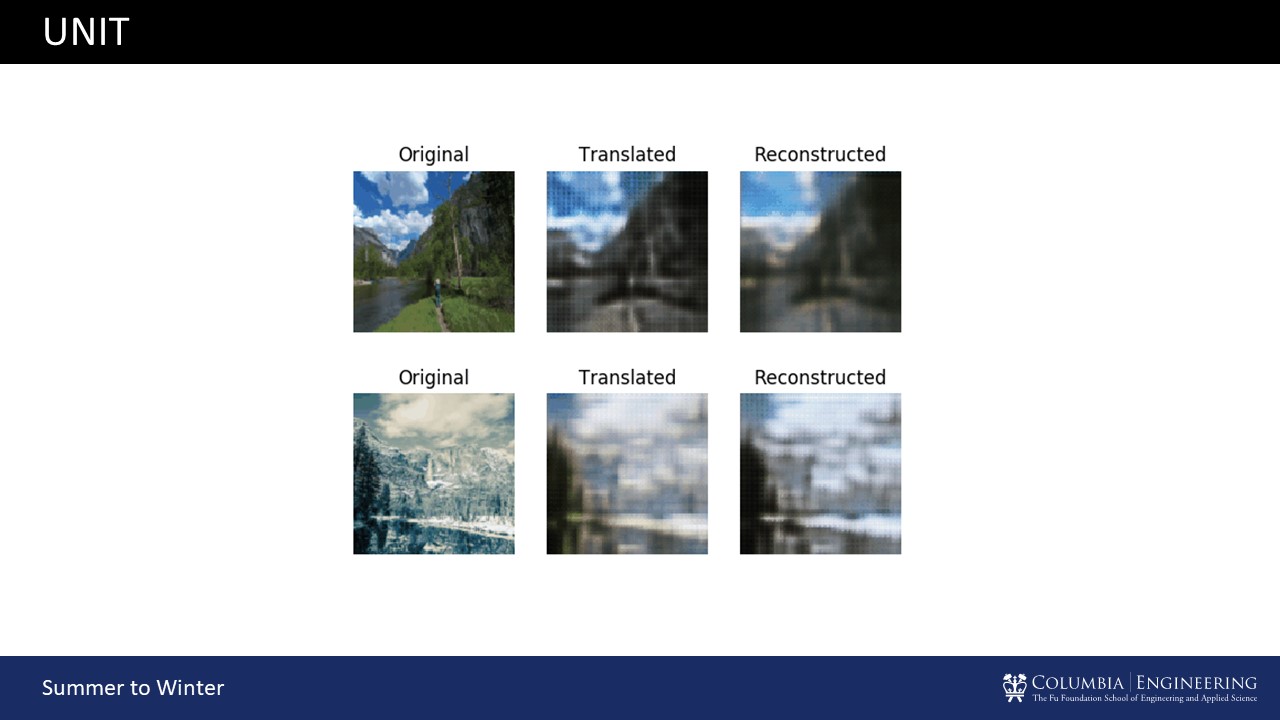
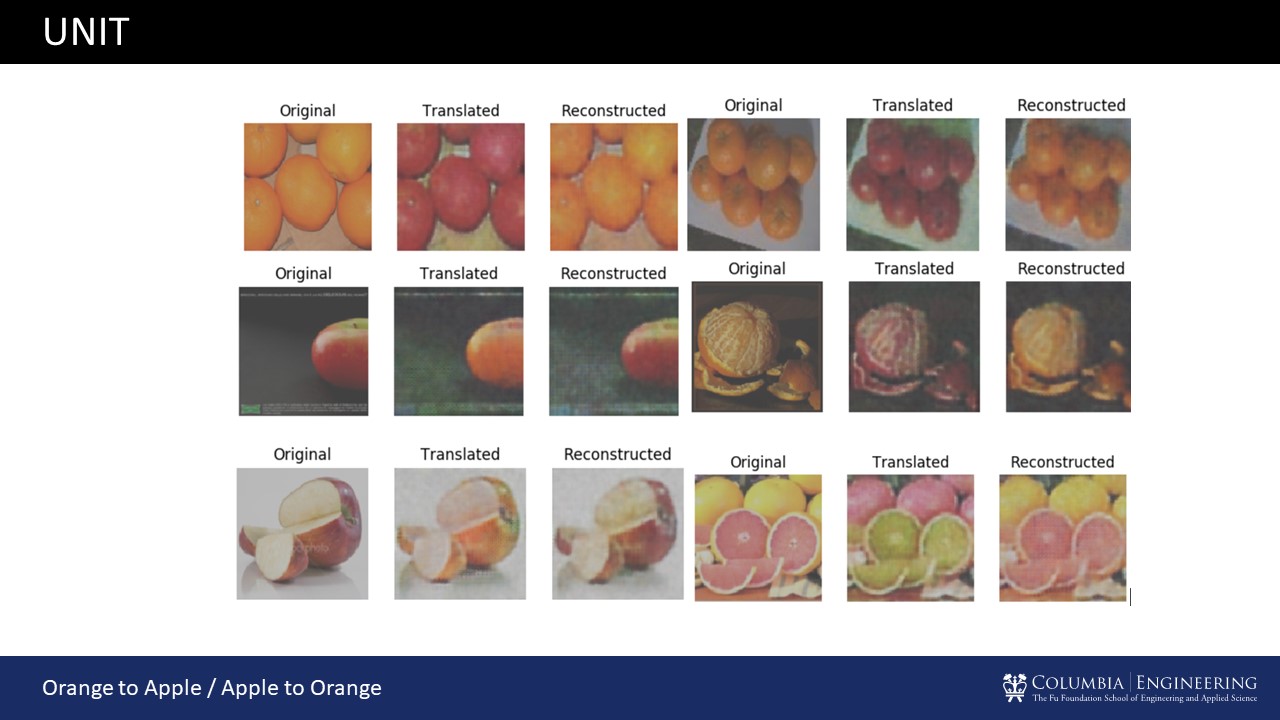
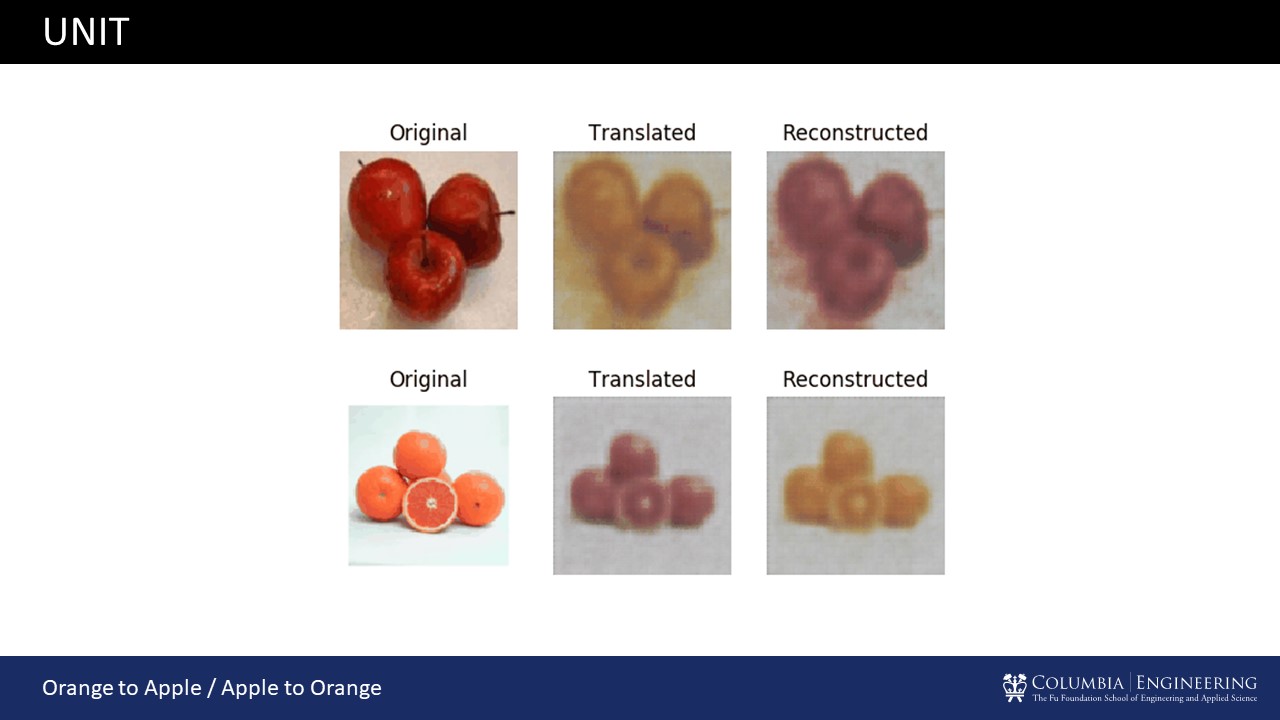
Image-to-Image GANs
For my applied deep learning class at Columbia, my team members and I explored various image-to-image translation methods involving generative adversarial networks. Please see the below slides to learn more about our project!




Hindsight Experience Replay (HER) for Robotic Manipulation
OpenAI’s Hindsight Experience Replay offers an incredibly insightful technique for reinforcement learning with sparse rewards. In our paper, we recreated and evaluated a variety of their robotic manipulation tasks and experiments: 1. Reaching a target, 2. Pushing an object to a target. 3. Picking and object up and placing it at a target, in which we respectively achieved testing accuracies of 96%, 97.5%, and 95%. Additionally, we attempted to add vision to our robot and obstacles to our environment to further investigate the limits and intricacies of HER. https://jerry-zhang.com/wp-content/uploads/2019/08/cs-6731-final-report.pdf
Evolutionary Algorithms for Robotic Simulations
To evolve a link and ball-based robot to maximize distance traveled, I first had to create a physics simulator in python. Then, after testing its robustness with simple shapes, I evolved a 3×3 cube-based robot. Evolution was done by first random selecting the combination of the features and generating 10 parents. For each of the parent, its elected features would be sent to simulation for 2 seconds and calculate the distance it moved. By repeating this, we used truncation selection for our evolutionary algorithm. Each length between each mass, were evolved to actuate based on an initially random and then evolved sinusoidal value. In order to evolve the cubic structure and innovative designs, a locomotion pattern was evolved between each mass to maximize velocity.
Robot Arm Manipulation and Path Planning via ROS

I worked heavily in ROS and linux in a couple of courses at Columbia. For, which I completed the following:
• Robotic Arm Manipulation: Created node in ROS capable of performing cartesian control and inverse kinematics for 7-joint robotic arm
• RRT for Robotic Arm: Programming RRT motion planning algorithm to maneuver end-effector to desired pose collision free
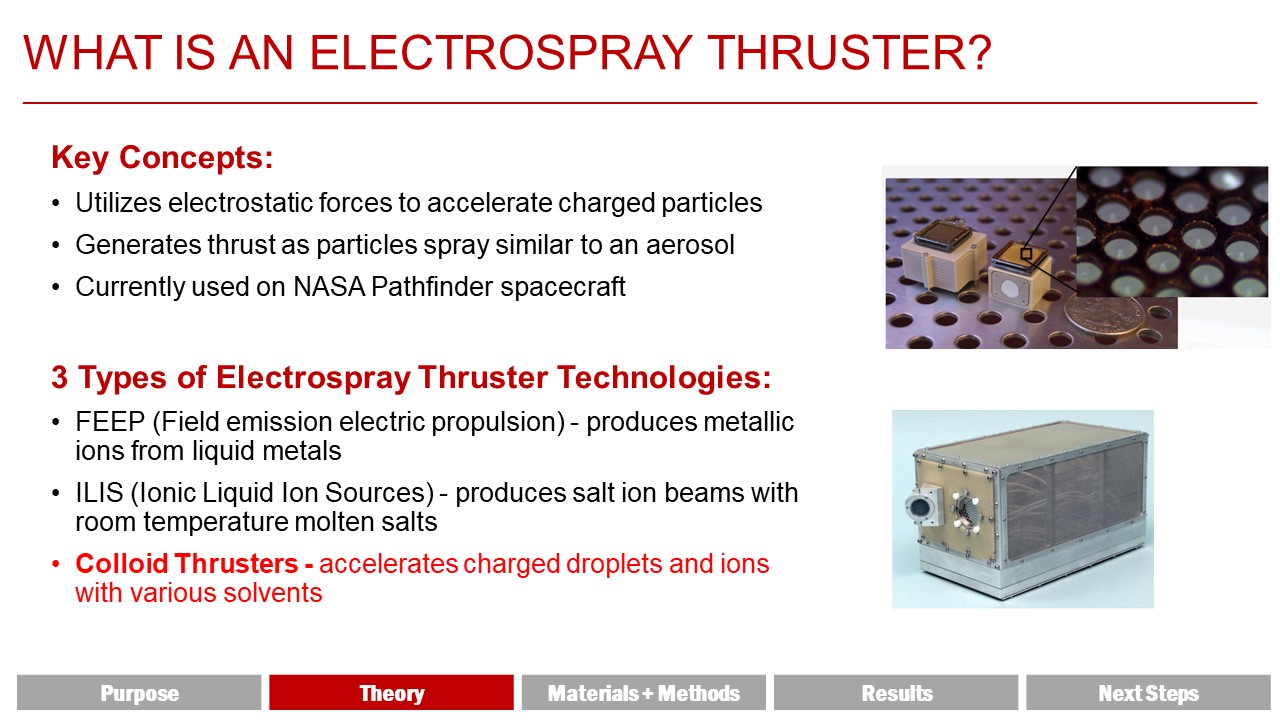
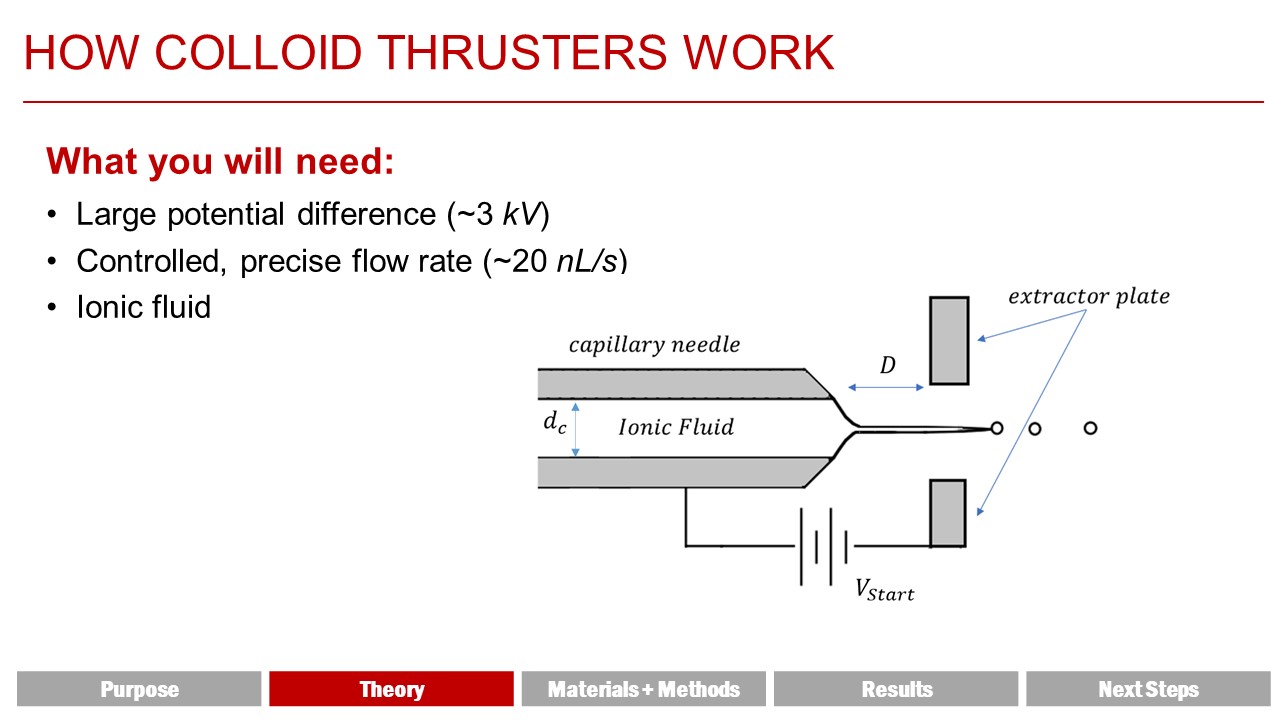
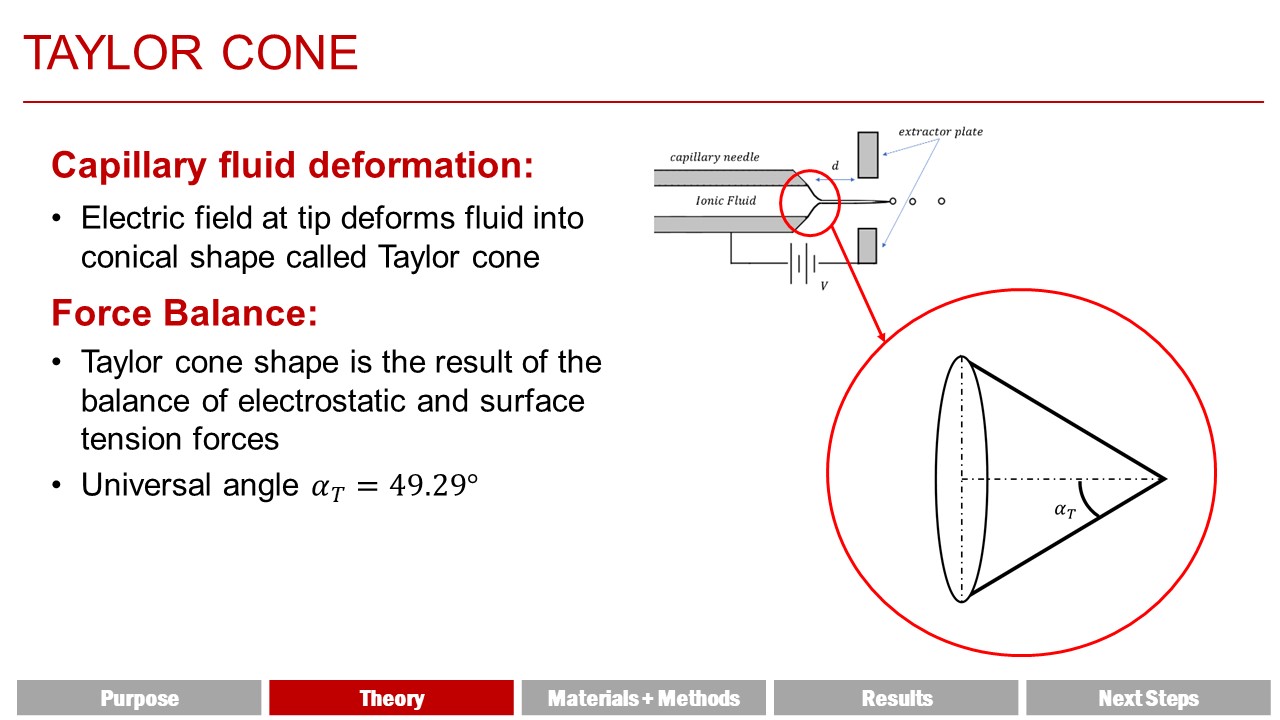
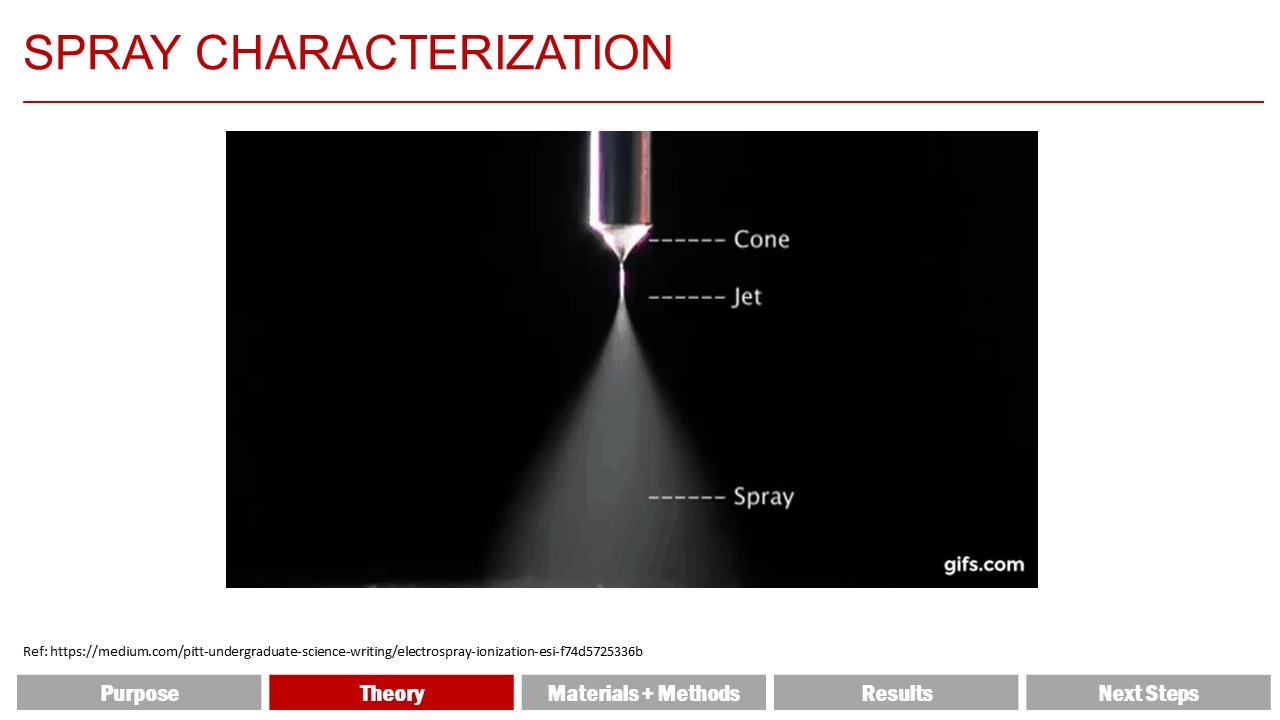
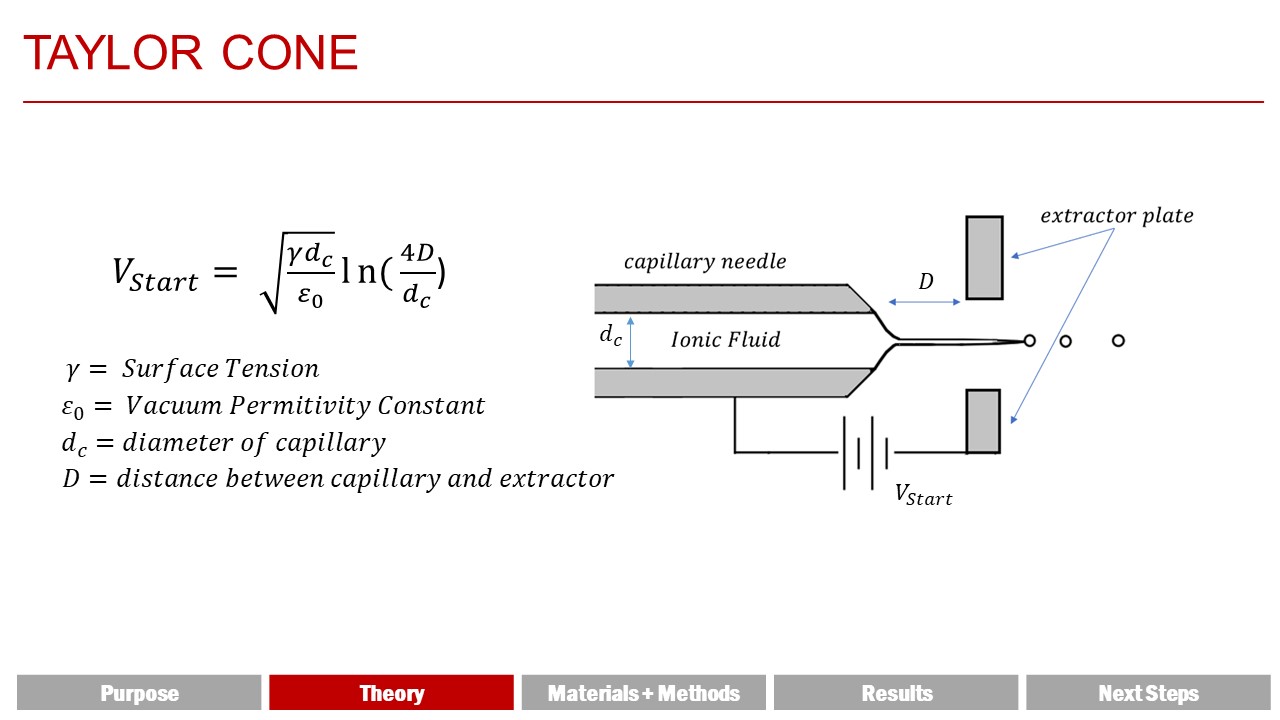
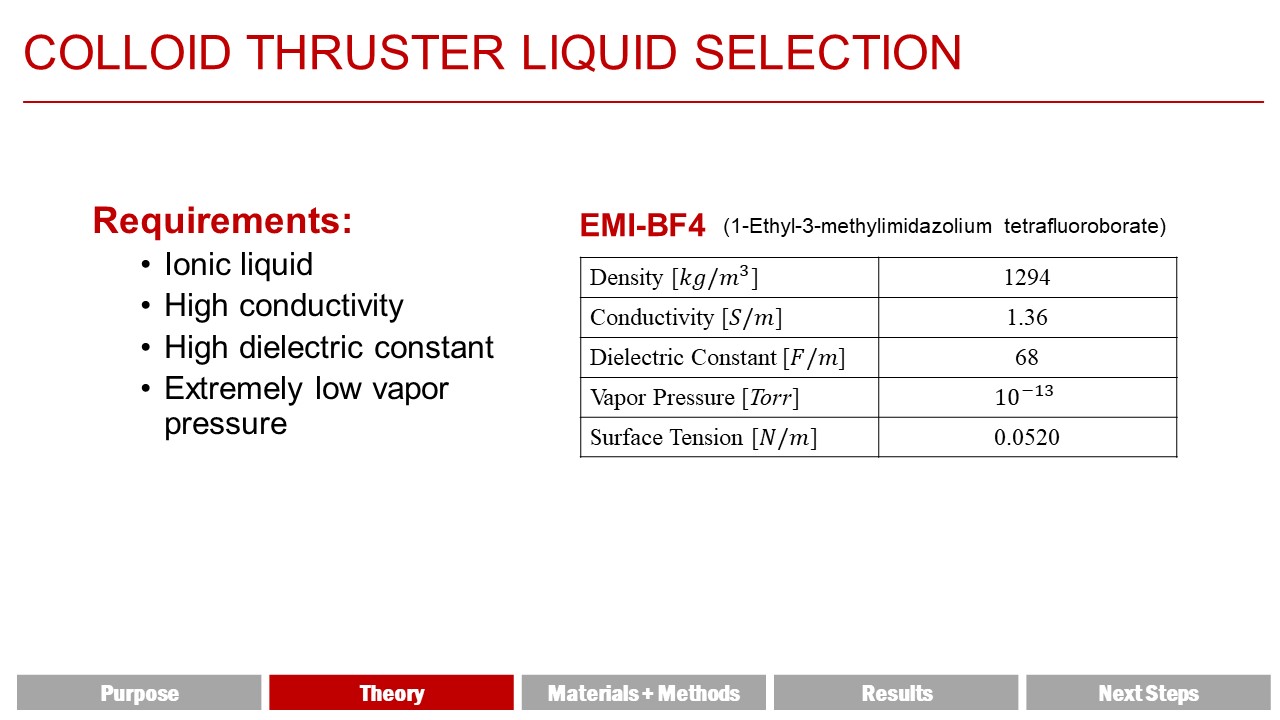
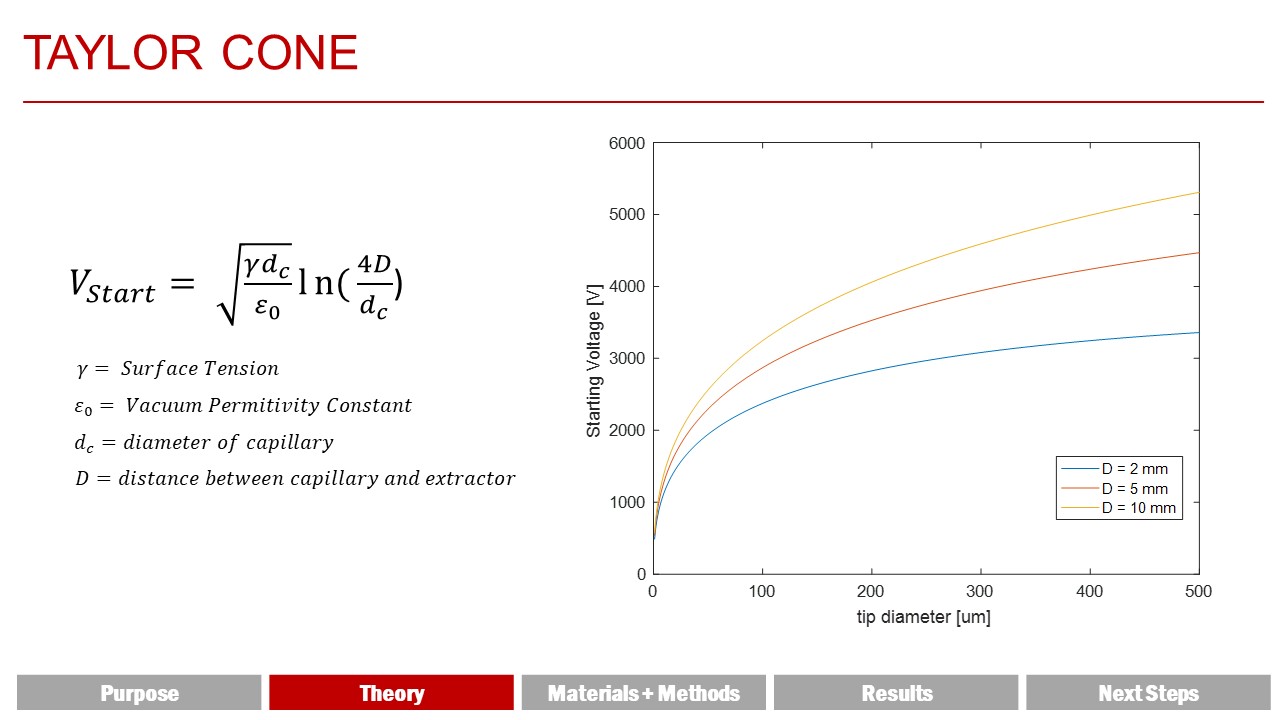
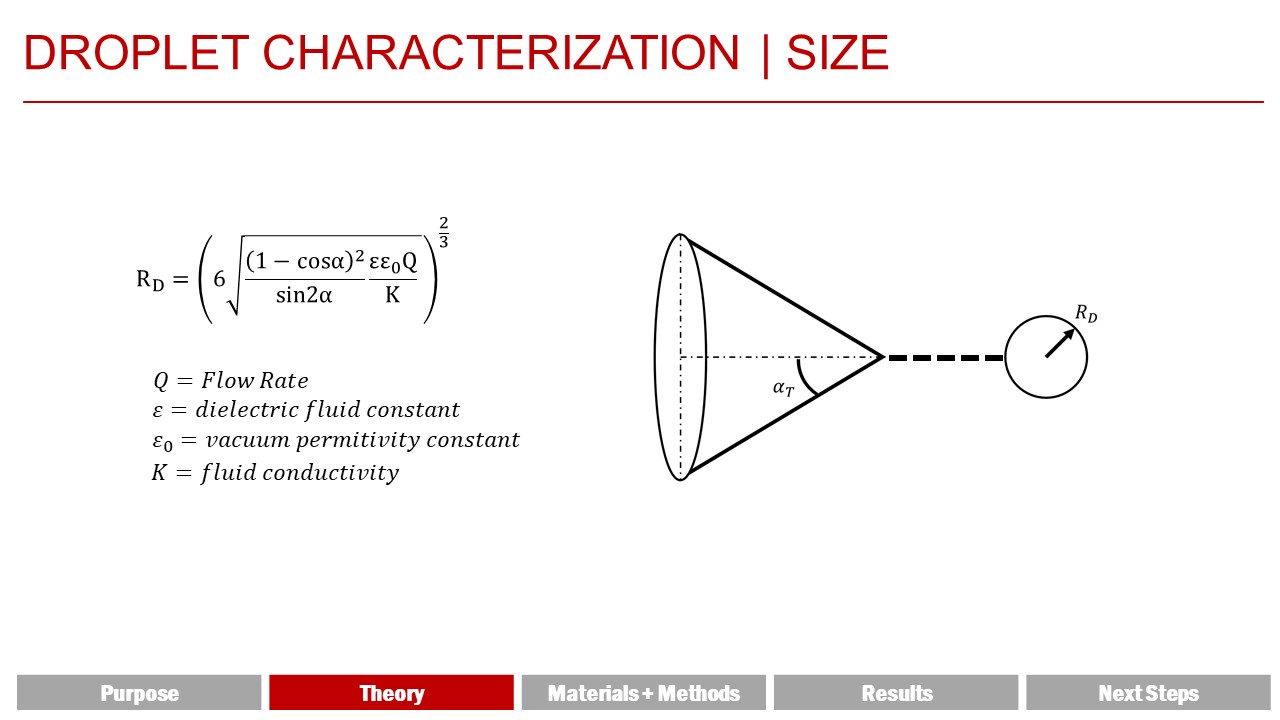
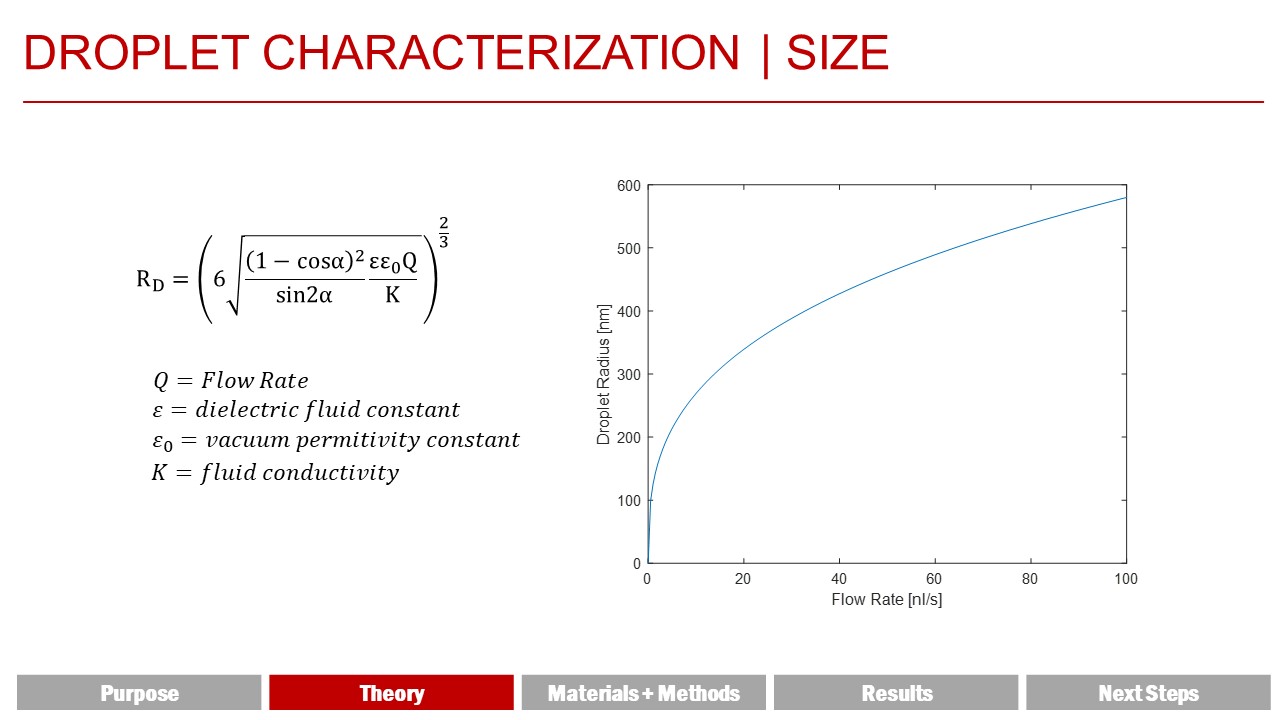
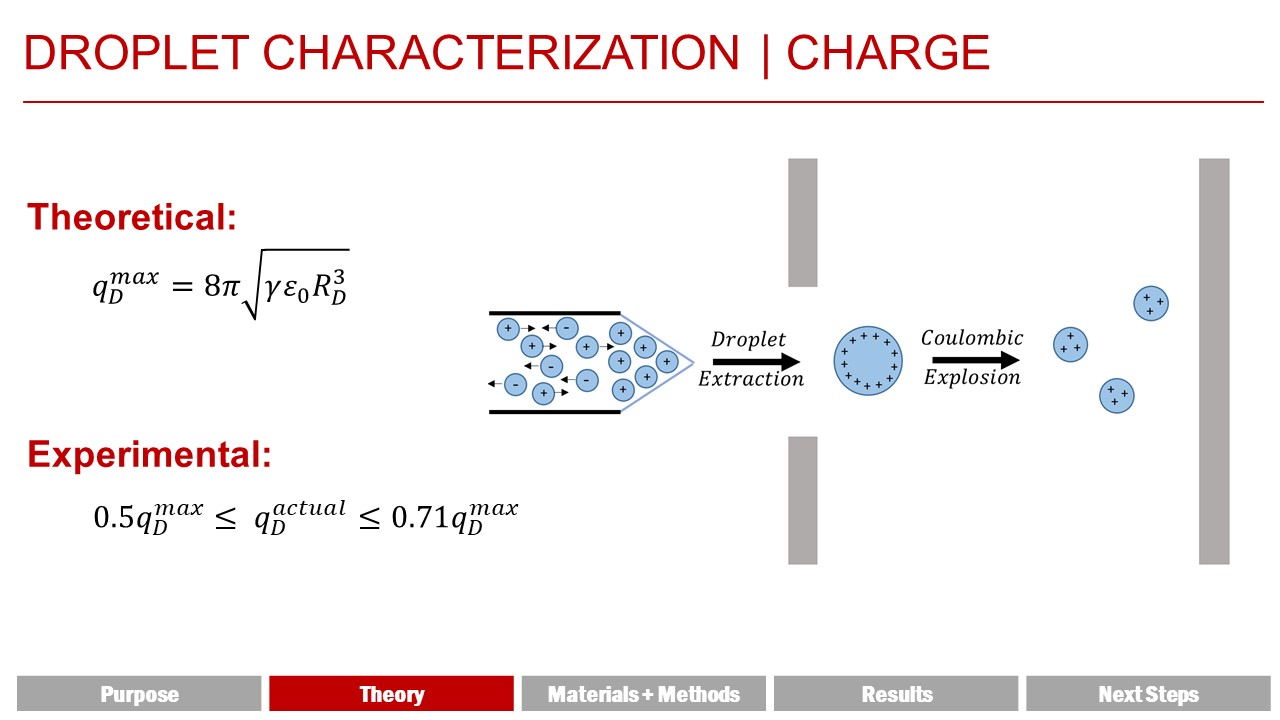
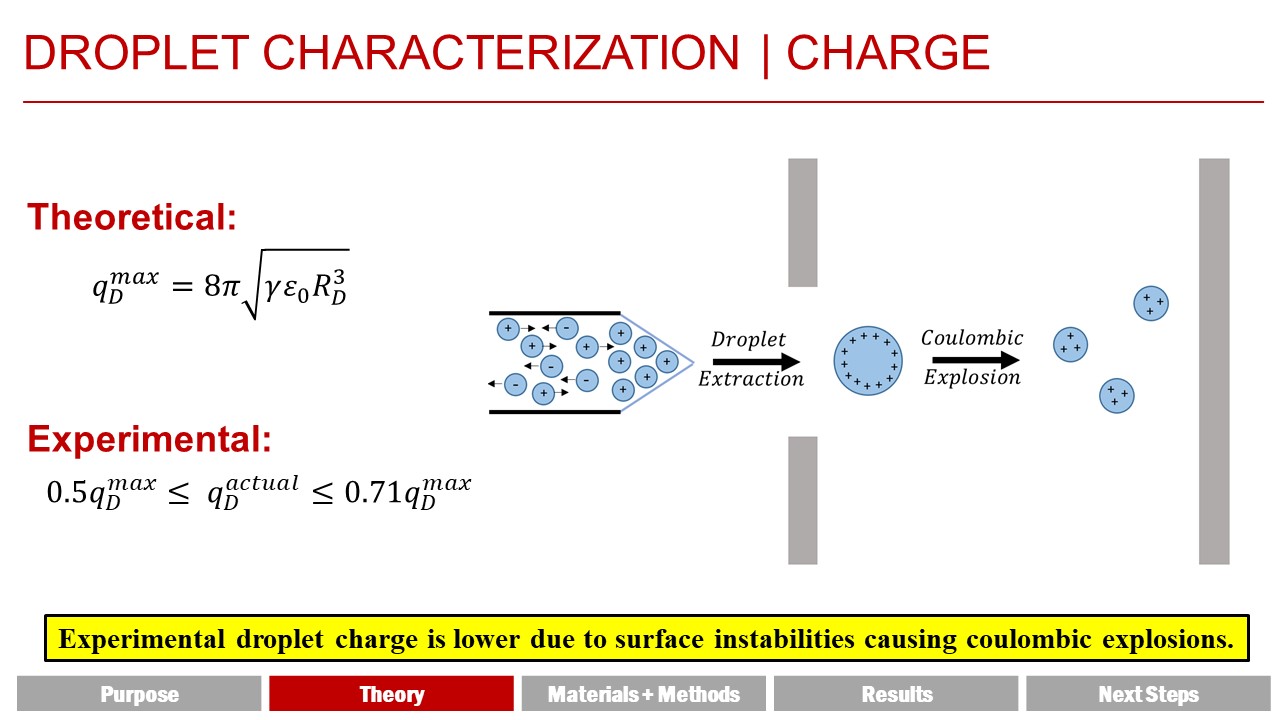
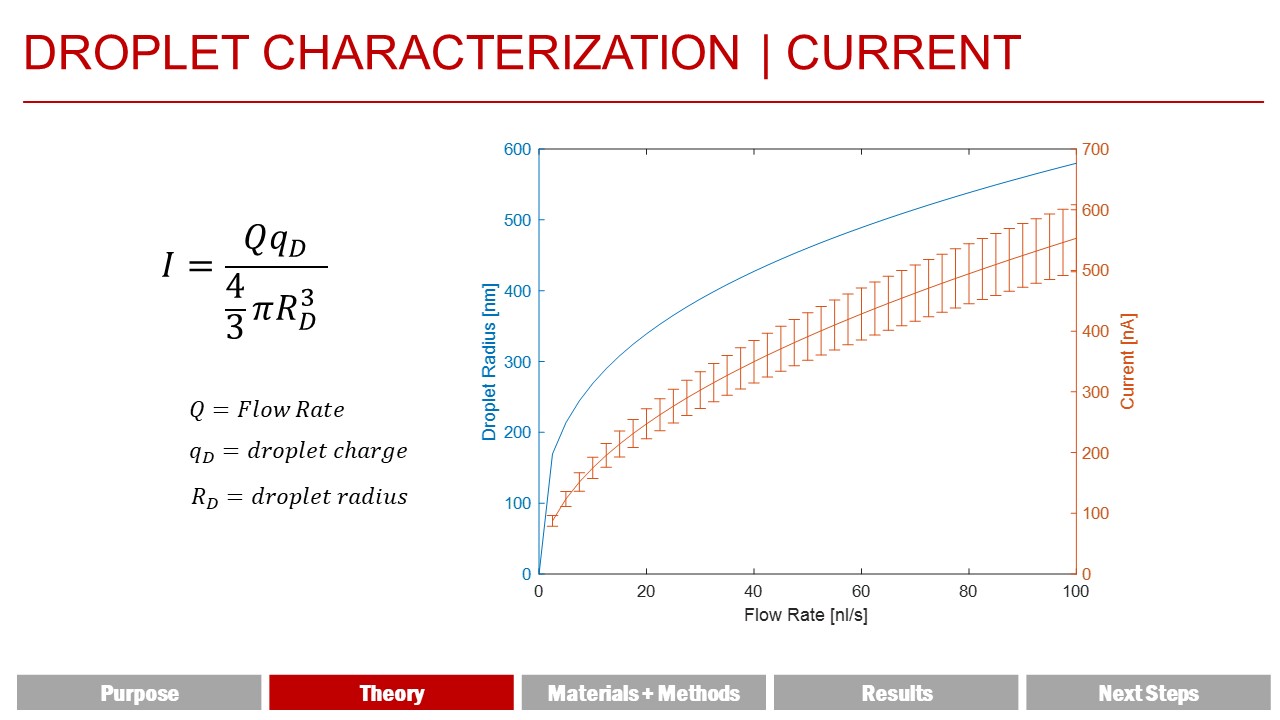
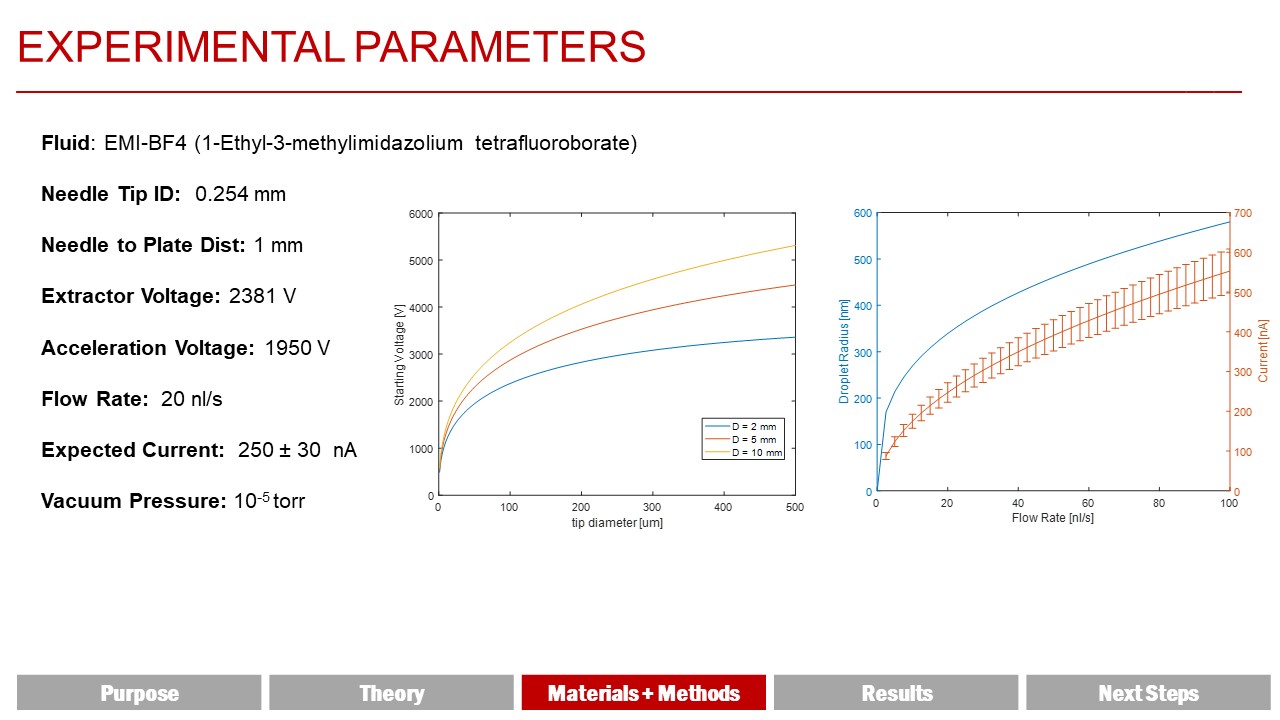
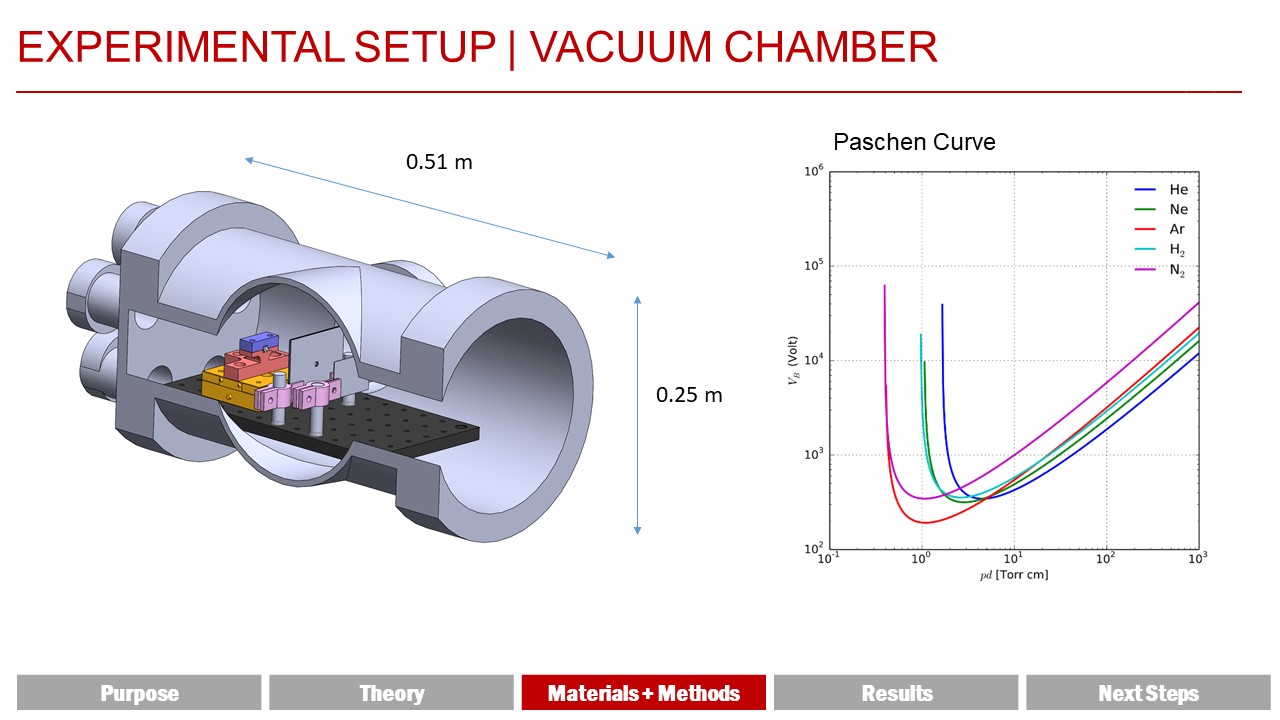
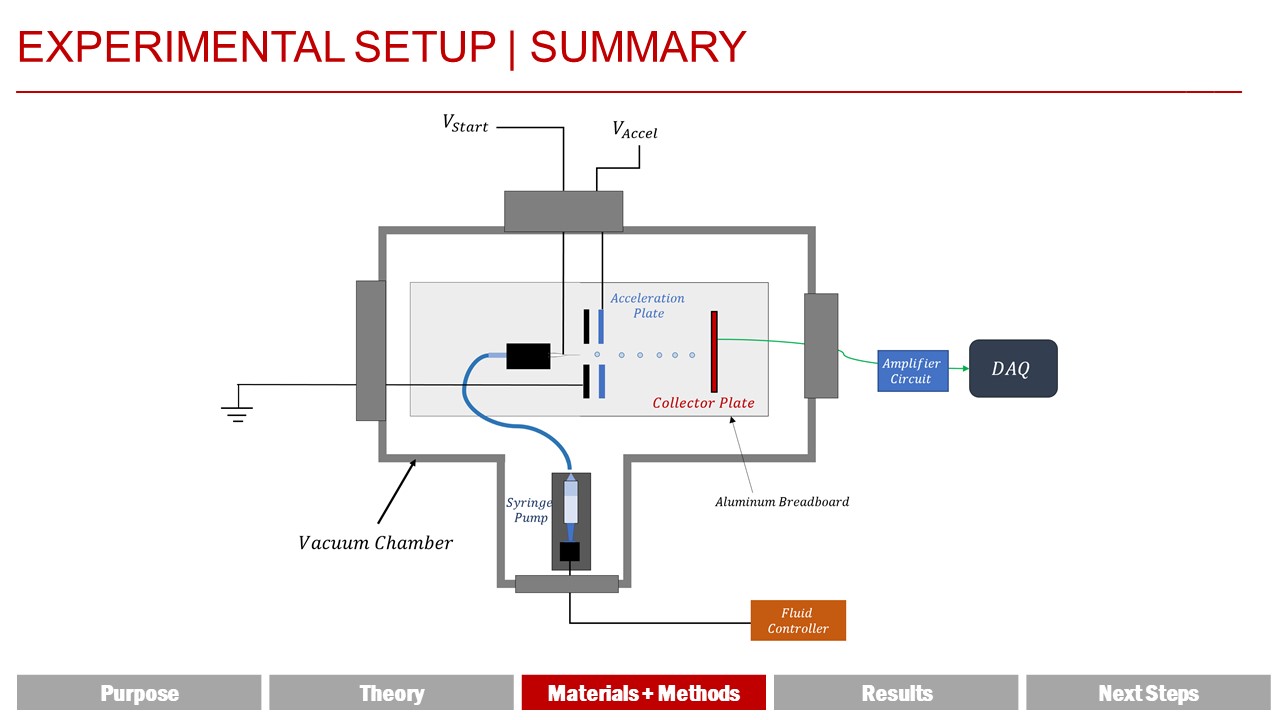
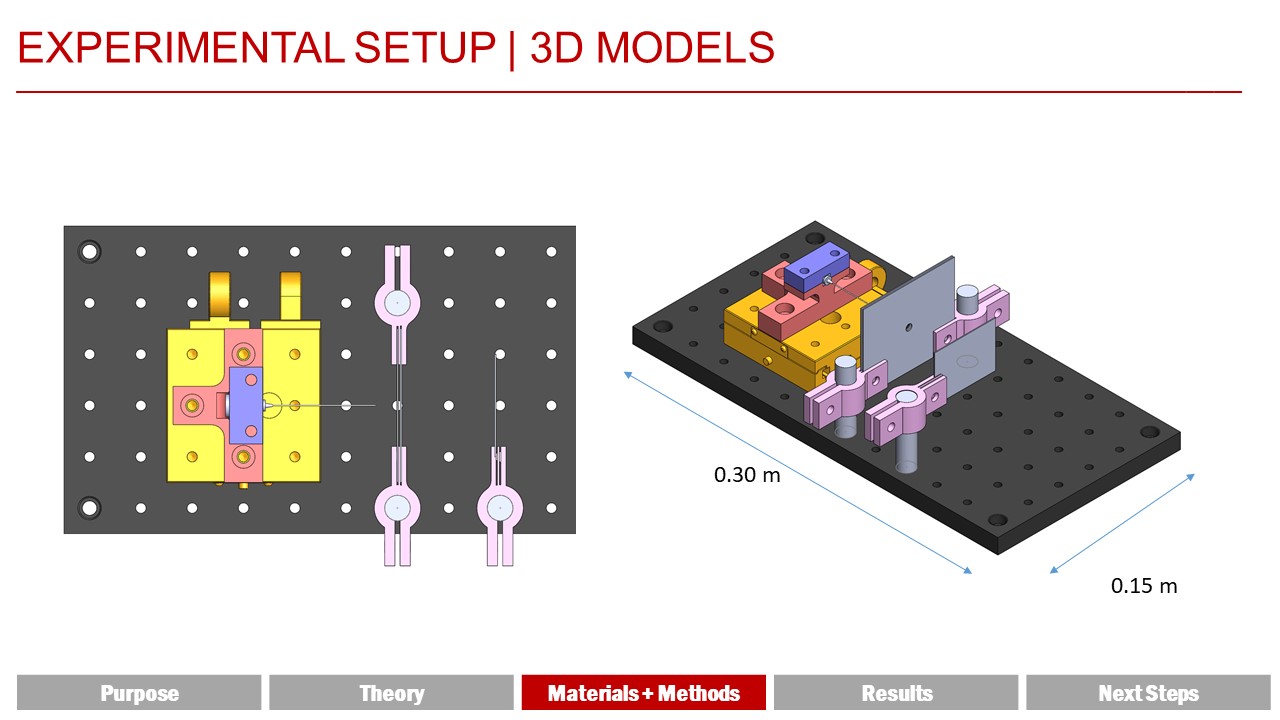
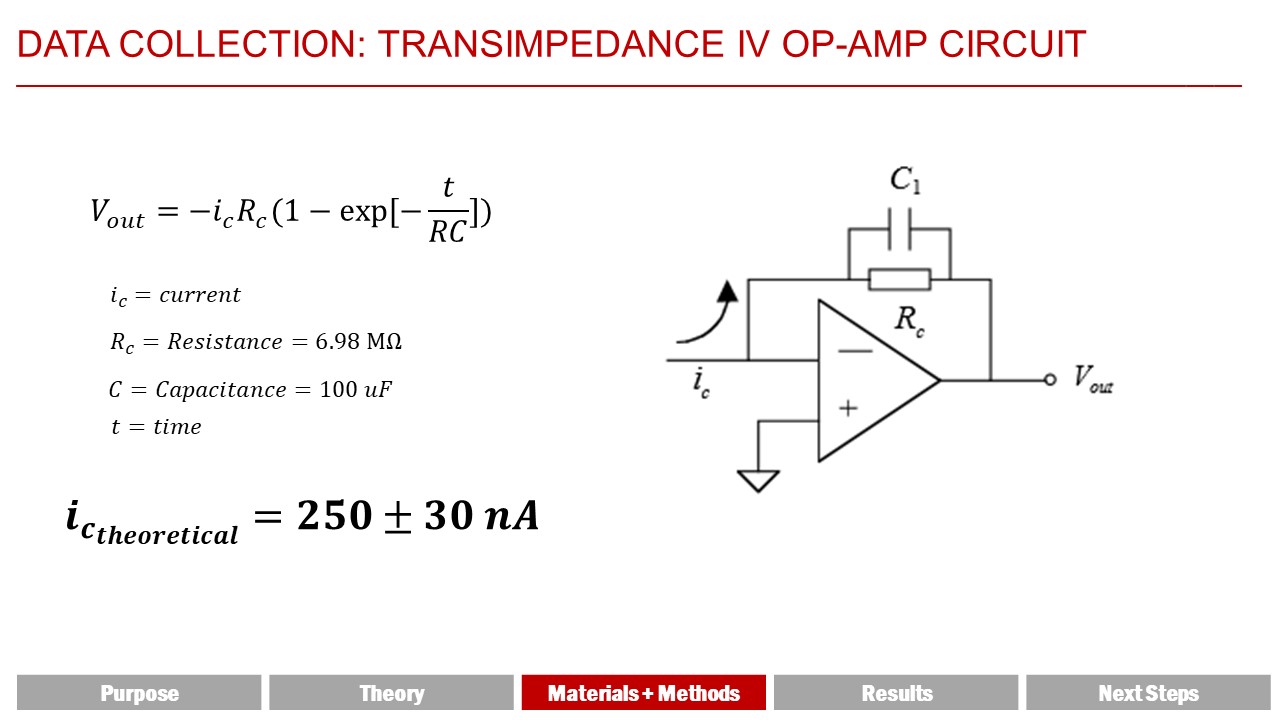
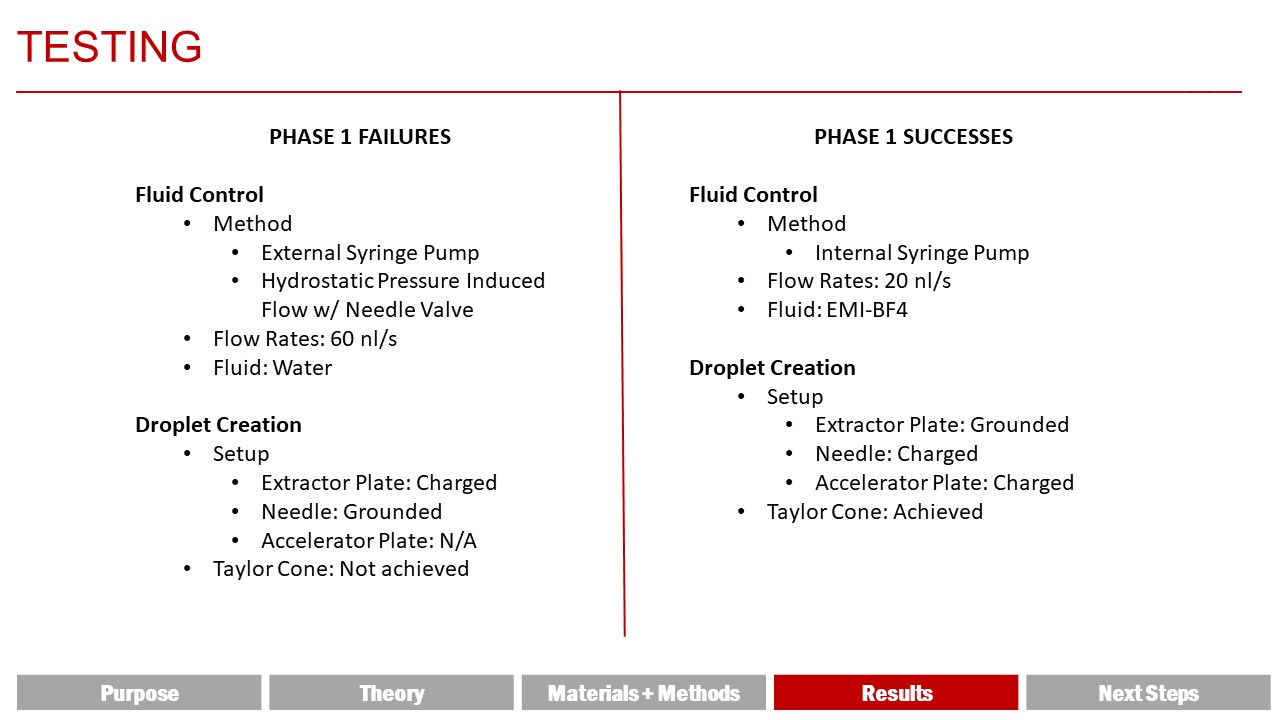
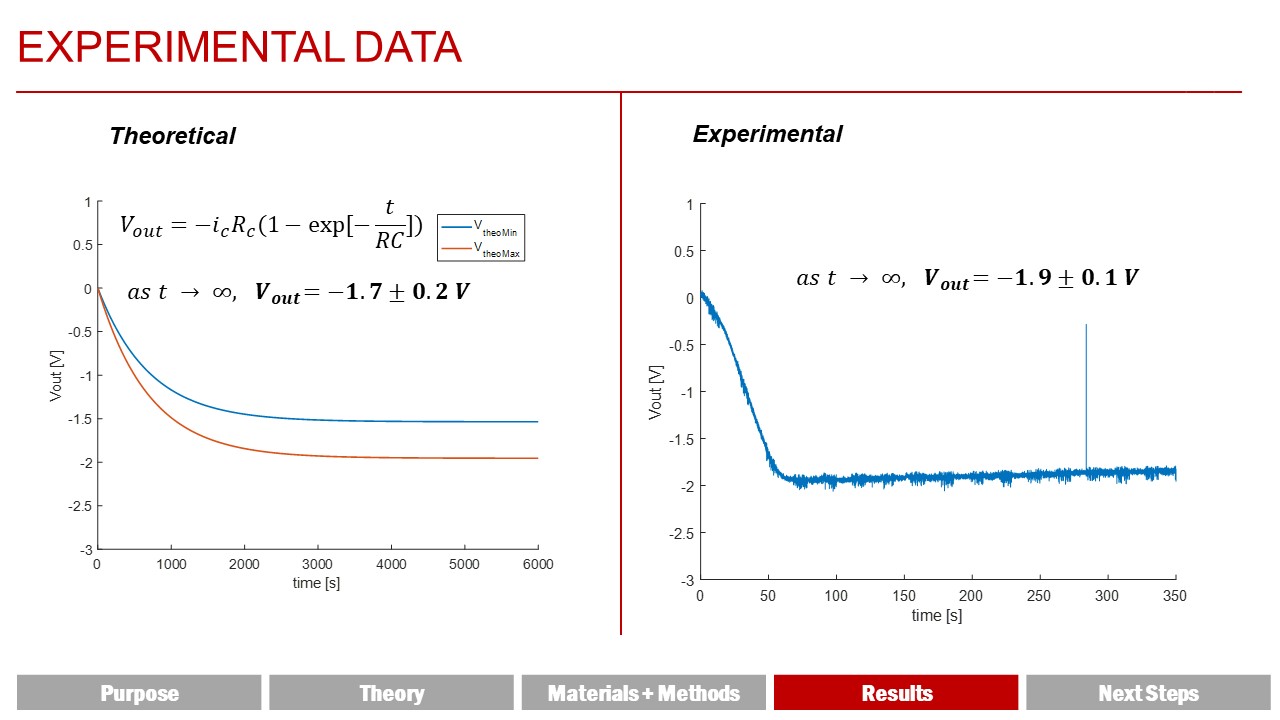
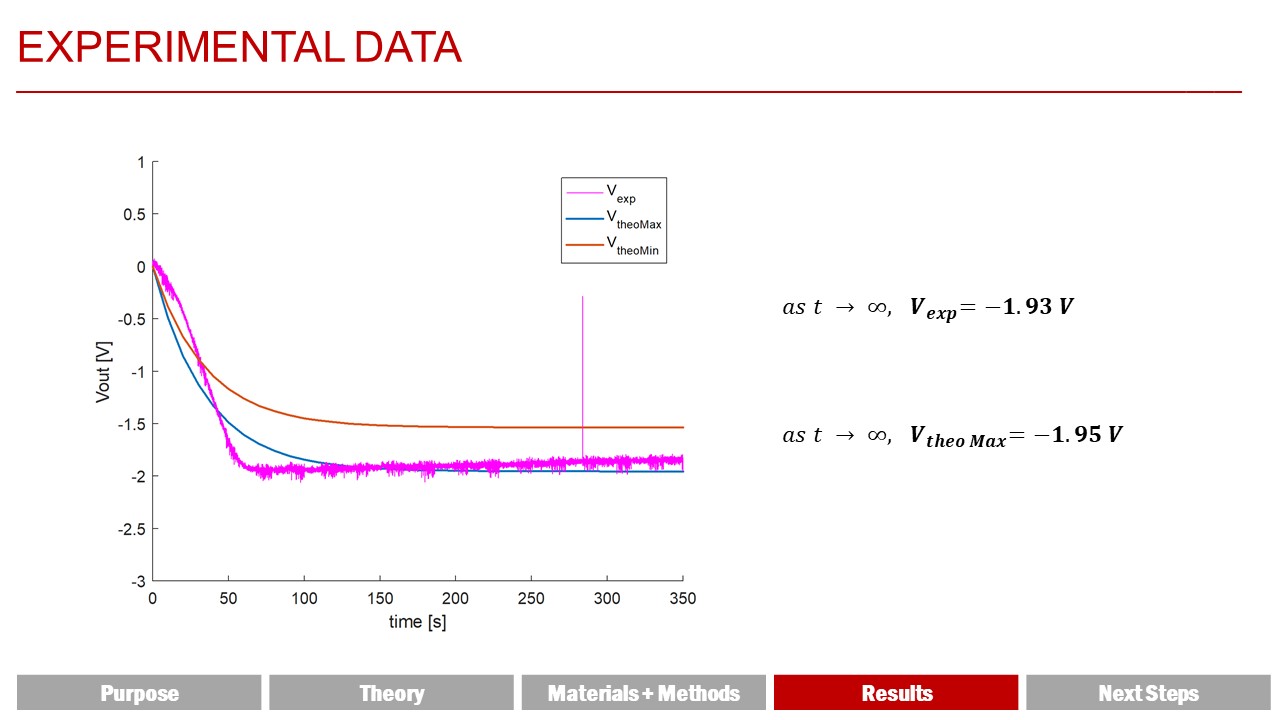
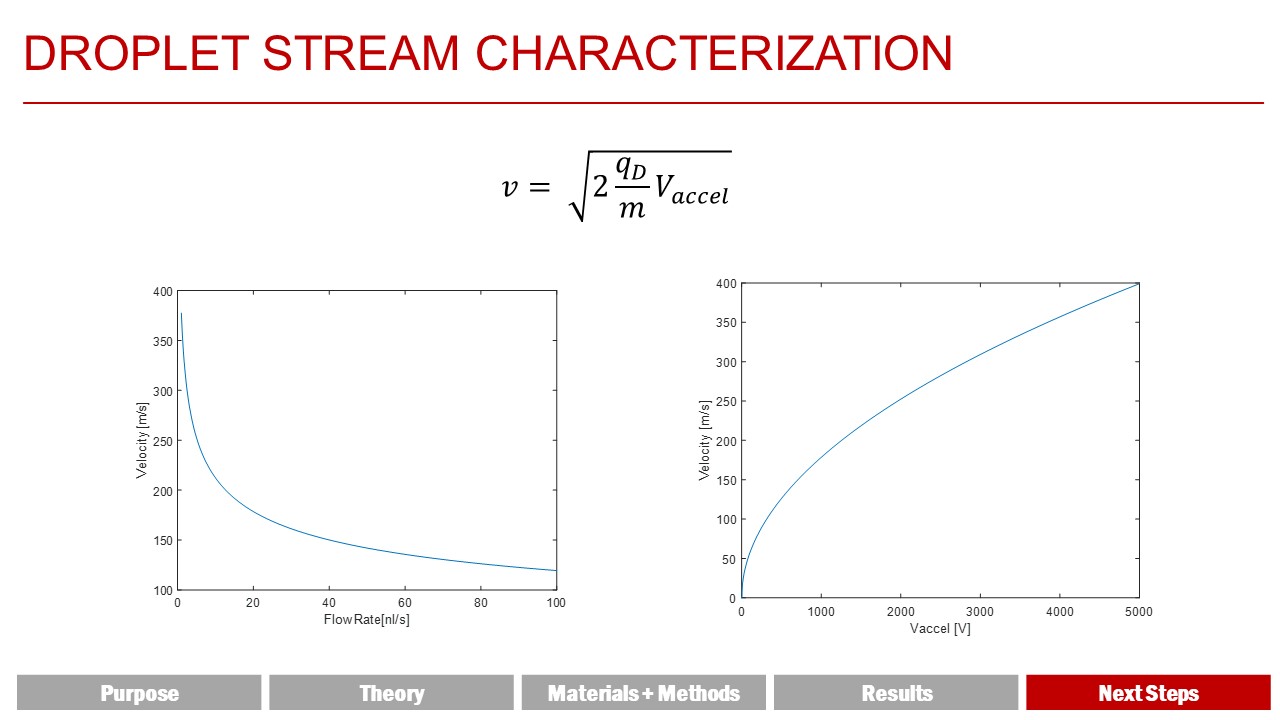
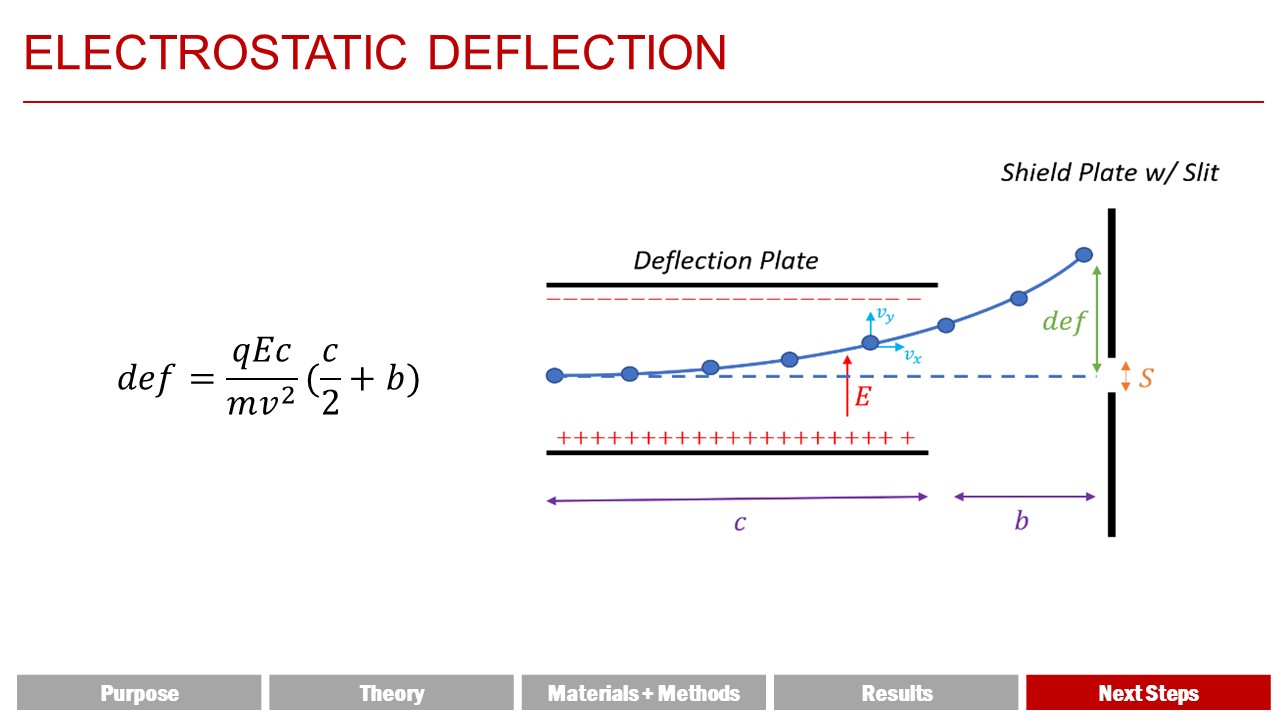
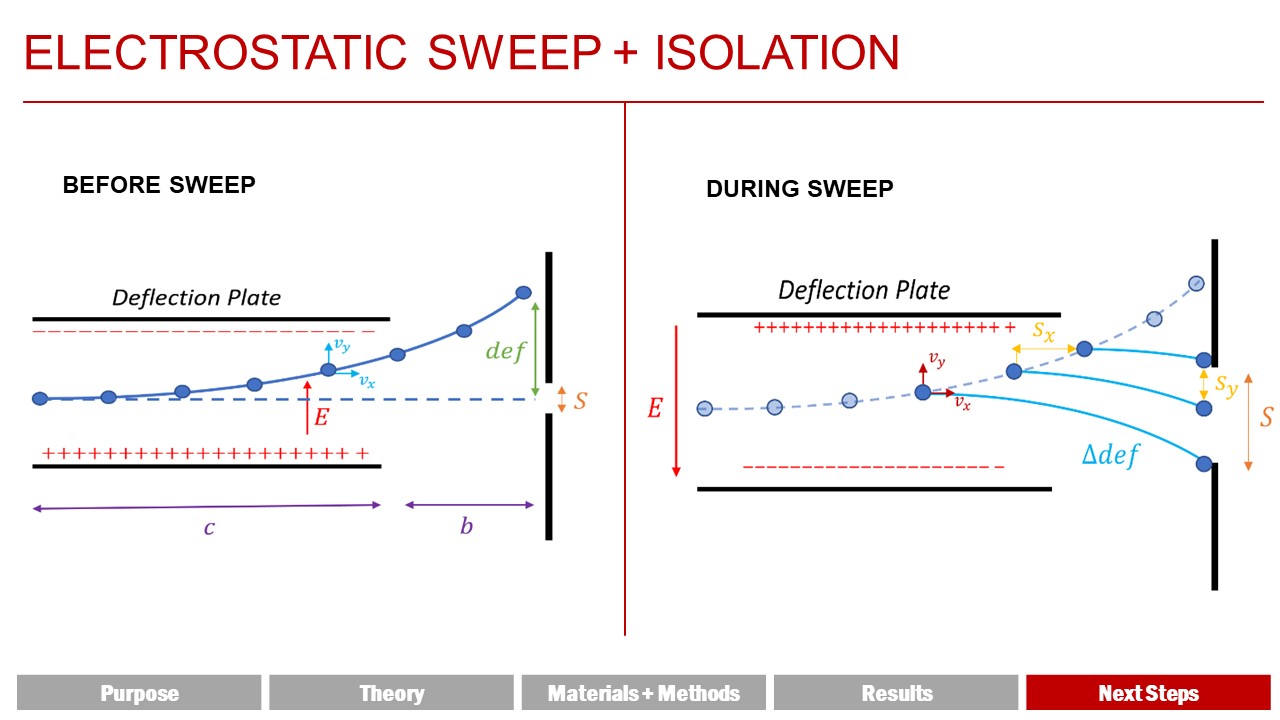
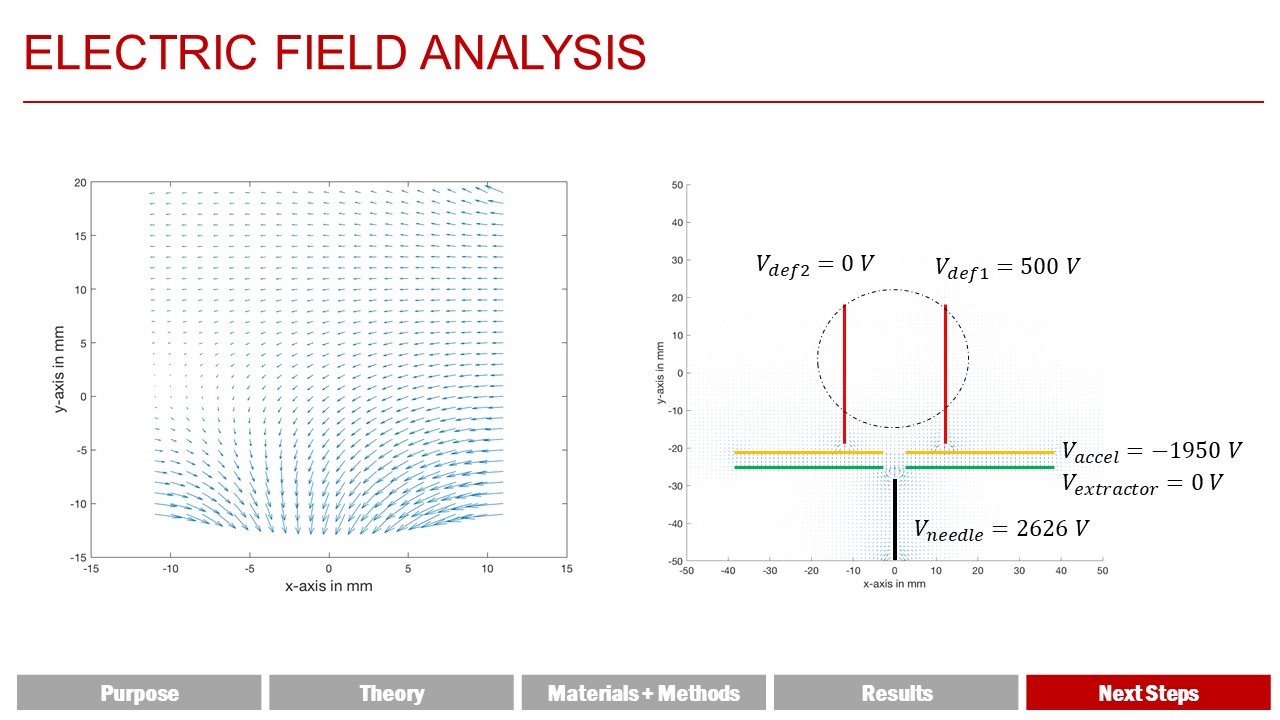
Electrospray Micropropulsion Thruster
For my senior project at USC, my friend and I created an electrospray thruster + testbed w/ high voltage power supplies, ionic fluid, precision syringe pump, rapid prototyped components. We assembled a vacuum chamber to operate at 10-5 torr w/ roughing pump, turbo pump, and ion gauge pressure sensors. Additionally, we had to create a transimpedance op-amp circuit + programm DAQ system to convert low current (~10 nA) ion droplets to readable voltages. After we were finished with our experimental system, we installed deflection plates to electrostatically deflect the ionic droplets as they disseminated out of our micropropulsion thruster.






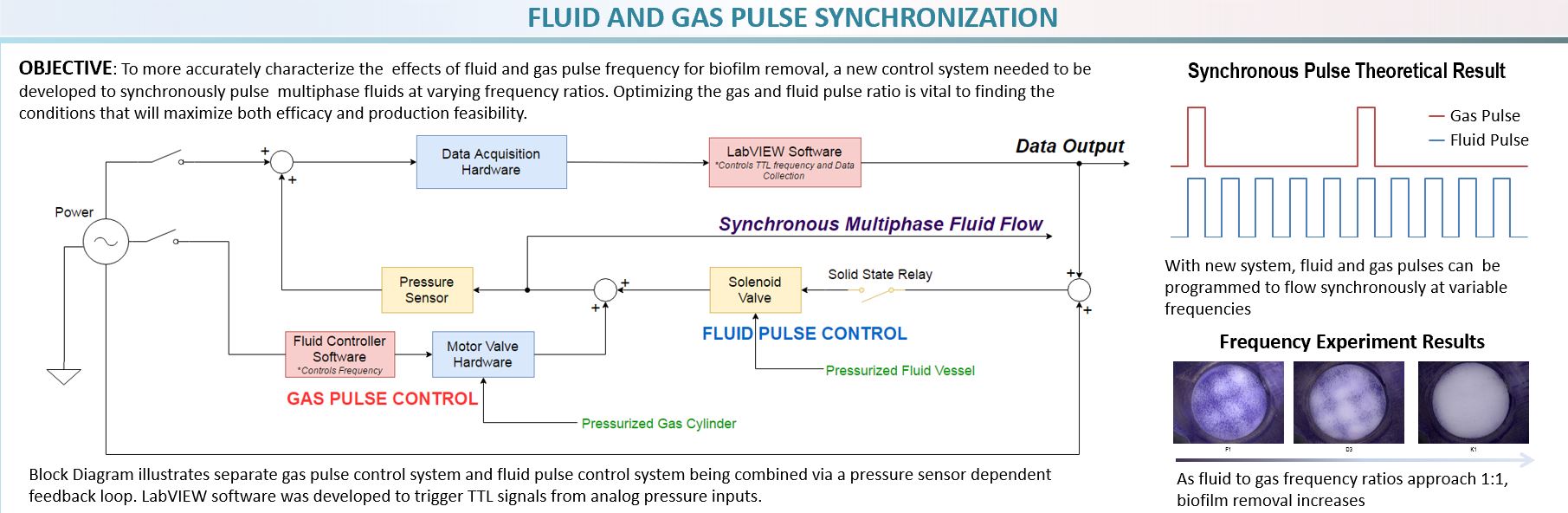
Air-Entrained Fluid Pulse System
During my time at JNJ, I was able to program, via LabVIEW, a continuous data acquisition software to control actuators based on immediate pressure sensor data. I created a feedback-based control system with a NI-DAQ to regulate multiphase fluid flow at customizable frequencies and pressures. With this system, our team was able to identify optimal fluid variables during clinical studies, which resulted in intellectual property and patent development
ICE: Infinity Case Electronics
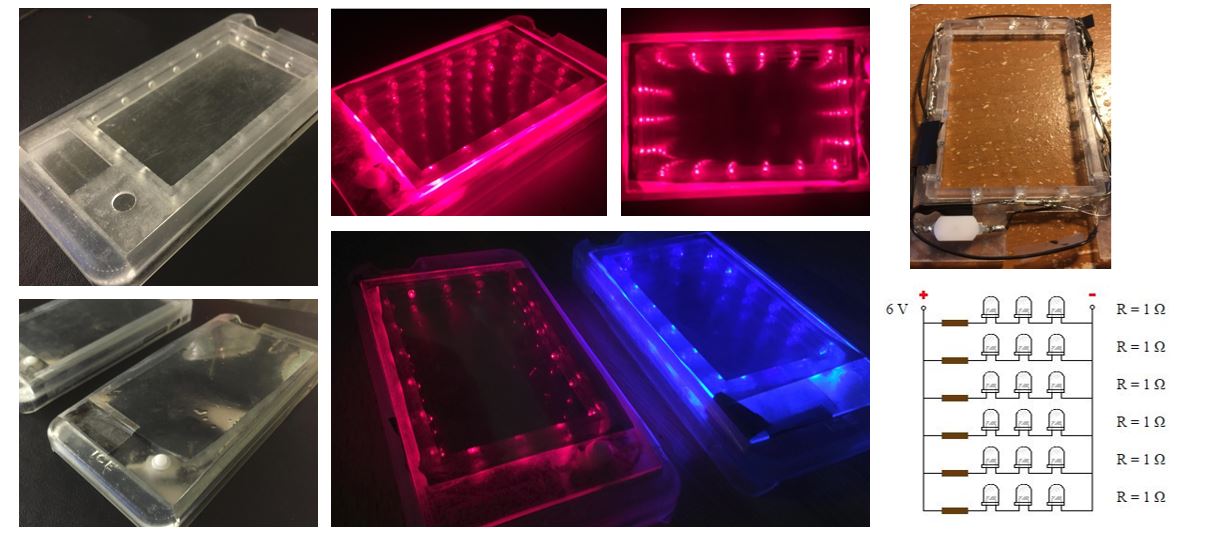
As a fun side project, I designed and created smartphone case product with LED components to allow for infinity mirror optical effect upon vibration. I had just learned CAD and taken Physics E/M in school, so I wanted too see how I could apply my newfound knowledge. At one point, I consulted with patent lawyers as well as NAVAIR engineers to understand future prototypes as well as production feasibility
